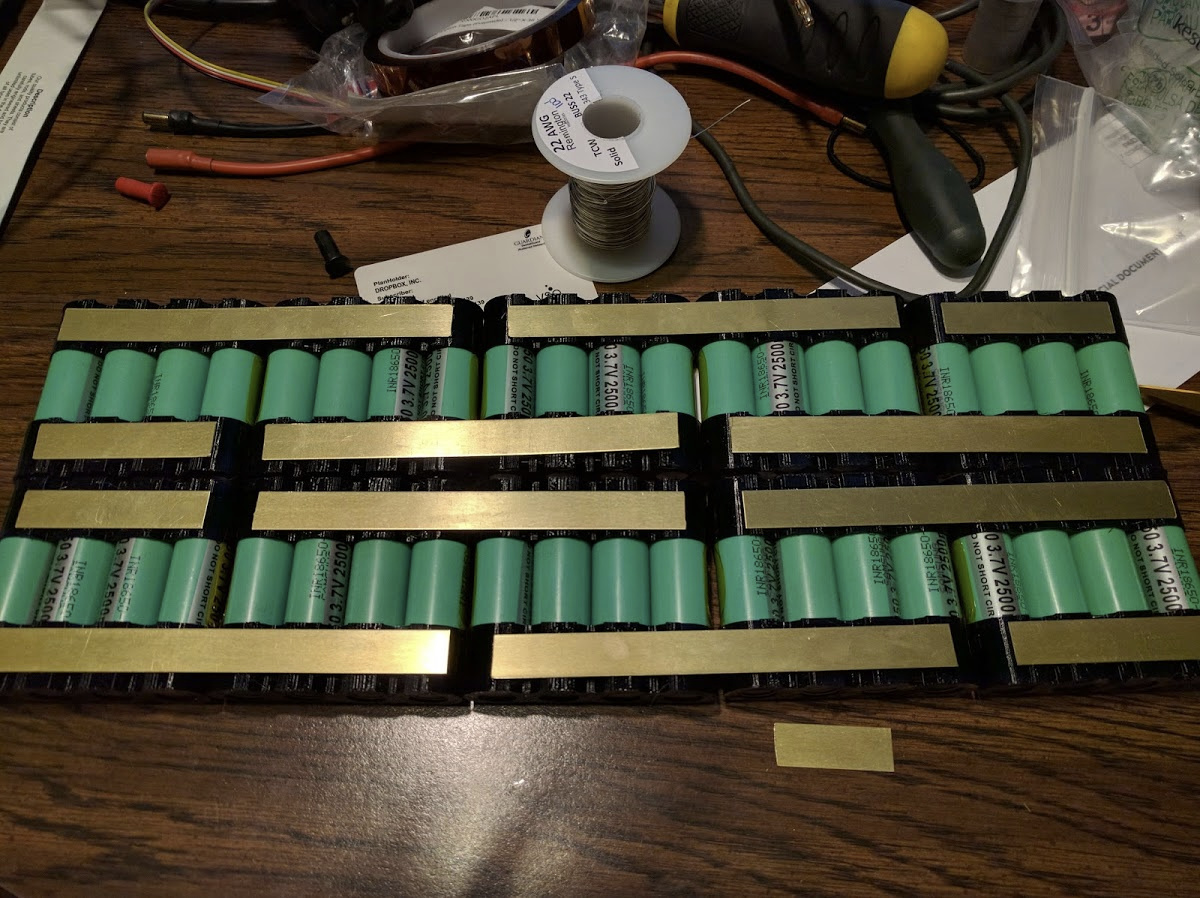
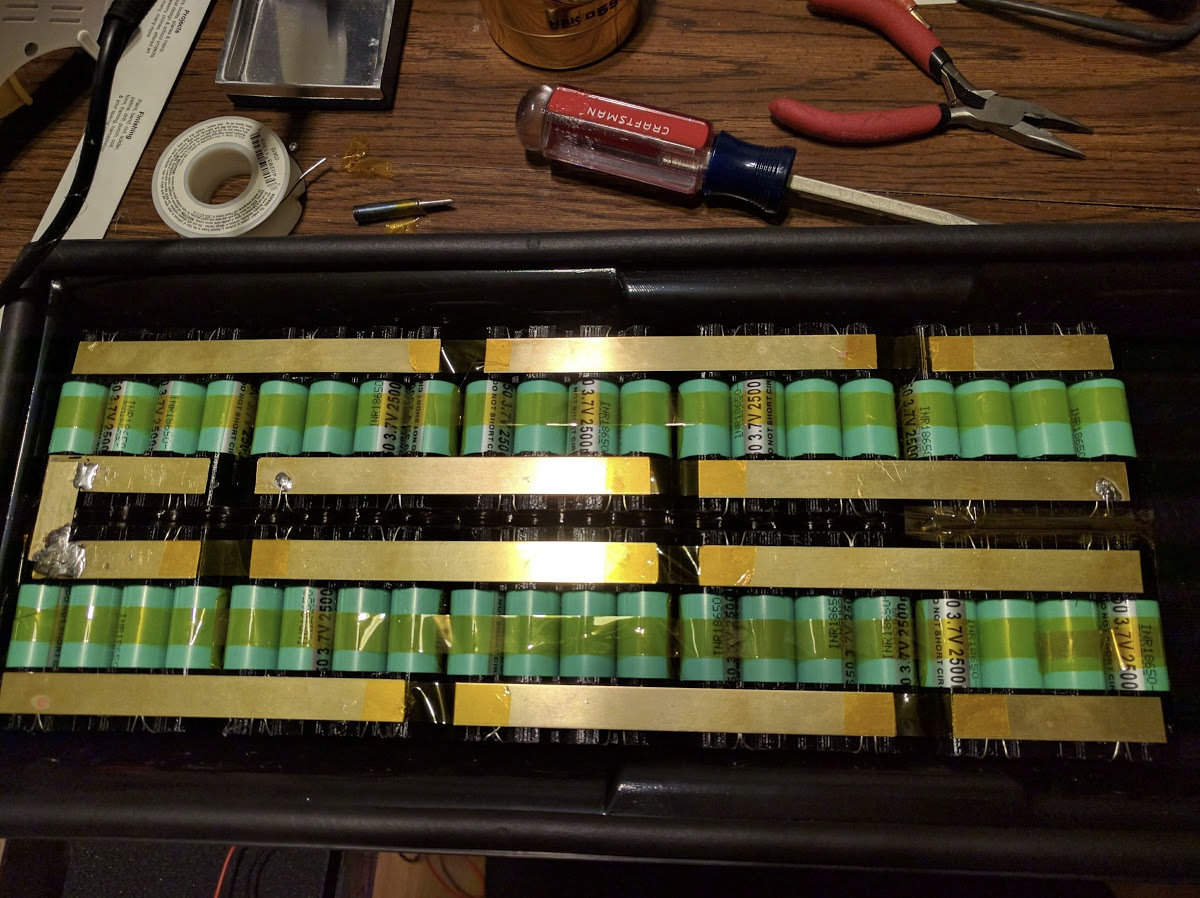
I got the space cell enclosure, you can see it in the last battery pic.
@Titoxd10001 I got the wheels on now, but working on solving the wheel bite issue with 97mm wheels. I think I’ll just have to tighten the bushings. Even with 1" risers, it’ll bite with these loose trucks.
I was wondering how the wheelbite situation was. I had similar build idea but calibers shortened wheelbase to much and also had to get a board with cutouts and now no chance of wheelbite with 97mm abecs.
UPDATES:
Finished up the drive train tonight and everything’s pretty much set. Just have to wait for the wood glue holding the cells down to dry. If this doesn’t secure it to the enclosure i’ll probably end up velcroing it down instead. My BMS was also DOA, so I’ll be using the pack without one until i get a replacement. Hopefully Raphael’s battman bms will be for sale soon
Reverse mounting with the TB v4 mount is inadvisable (Keep in mind it’s not even possible unless you chop your mounts like me). Even with 97mm wheels, the mount is less than inch from the floor and will definitely hit when going off driveway sidewalk lips. I’ve brought it as high as I possibly can on 280mm belts. Any higher and the 63mm motors would be hitting the trucks.
26" wheelbase is not enough for the space cell enclosure. I’d very much rather inward mount the motors, but space limitations prohibit me from doing so. I could’ve moved the enclosure forward to leave room for the motors, but this would mean my from 2 screws wouldn’t be screwed in on the enclosure due to the way the board is shaped.
One of the motors fails to detect the hall sensors properly when spinning the correct direction. Oddly enough, it detects the sensors when spinning the wrong direction. I’ve tried changing the phase/sensor wire order around but no dice. Always works in the wrong direction, but never in the right.
My BMS was faulty so this thing is running without balancing for now. I’ll minimize risk by charging to 90% max and discharging to 20% min.
Wood glue oddly is good (so far) for holding the cells down to the enclosure. If it breaks I may swap in some industrial strength dual lock.
I haven’t ridden it outside yet due to rain, but I’m really worried the motors will get a beating from dropping down slight heights or hitting holes/speed bumps.
Yea i’m not entirely happy with how low they are either. I can think of a couple ways to fix this though. The most preferable way is to obtain longer trucks (best bet is to get salvaged Boosted trucks since they’re also Caliber). Another way is to get an angled riser to bring the mount up just a bit more, or chop my current 1" risers to be angled. Lastly, and least preferable, is to get 2 longer mounts, but 280mm belt is the longest I’d want to go.
I’m not so much worried about the mounts hitting the floor as I am the motors.
Installed angled risers to get the motors further from the ground, chopped some screws so they don’t hit the motor, and replaced a faulty motor (thanks @JLabs) . Sensored now runs perfectly! I can’t say I’m in love with the nano-x though since the throttle travel is tiny (just like the winning), but I haven’t had any cut outs so far. I also don’t like the position of the throttle when you’re gripping it. It’s wayyy too far back and leaves your thumb in an uncomfortable position. Riding just a couple miles made my hand start cramping up. Hoping to pass this thing off to @evoheyax soon and use my benchwheel remote again!
33+ mph. Range is really situational since I live in an area with a ton of hills, but I get about 20~ miles here. I imagine you’d get 25+ miles without these hills. No need to PM cost, it was about $1400 all-in-all, but I haven’t kept track very well.
Would you say any of your builds would outspec any board out there for the sake price?
Considering the cost of all these builds I can’t discard the idea of getting a Raptor 2, better specs, lower budget. The only benefit going DIY is the immediate availability of parts for a shorter ETA, that great learning process and the self fixing knowledge in case something needs to be fixed.