Hello Everyone!
Over the last few months i’ve been working on an E-MTB after building a regular Longboard which i liked very much, but it isn’t the right thing for my somewhat rural region (middle-ish germany).
My current state is that i tested it today in the garden. Climbed some small but steep hills to test the gears, but it was dark and fucking cold so i didn’t drive that much. Just thrashed it around for a bit. There’s still much on the to-do list but i’m very glad it actually worked.

That’s the current state of the board, functional but not at all finished.
My Goals for the Build are:
- VESC 6 for reliability
- more torque than speed
- reasonable range of ~20km
- arduino based remote and telemetry system in a trigger style remote
and most importantly:
a 3D printed Drivetrain
My design started with a Nowind style gear setup which consists of regular encapsulated gears, but after roughly estimating the print time it was clear that ~40 hours of printing for just a single drive just wasn’t feasible.
So then i remembered Lee 13’s Website and his Inner Gear Drive that really resonated with me. It’s just so elegant and as space efficient as imaginable (at least until hubs for MTBs arrive). Drawbacks of this design are mainly that you cant use 8072 Motors anymore, but that’s ok for me because of the higher gear ratio that is achievable. I want torque for this board, not speed.
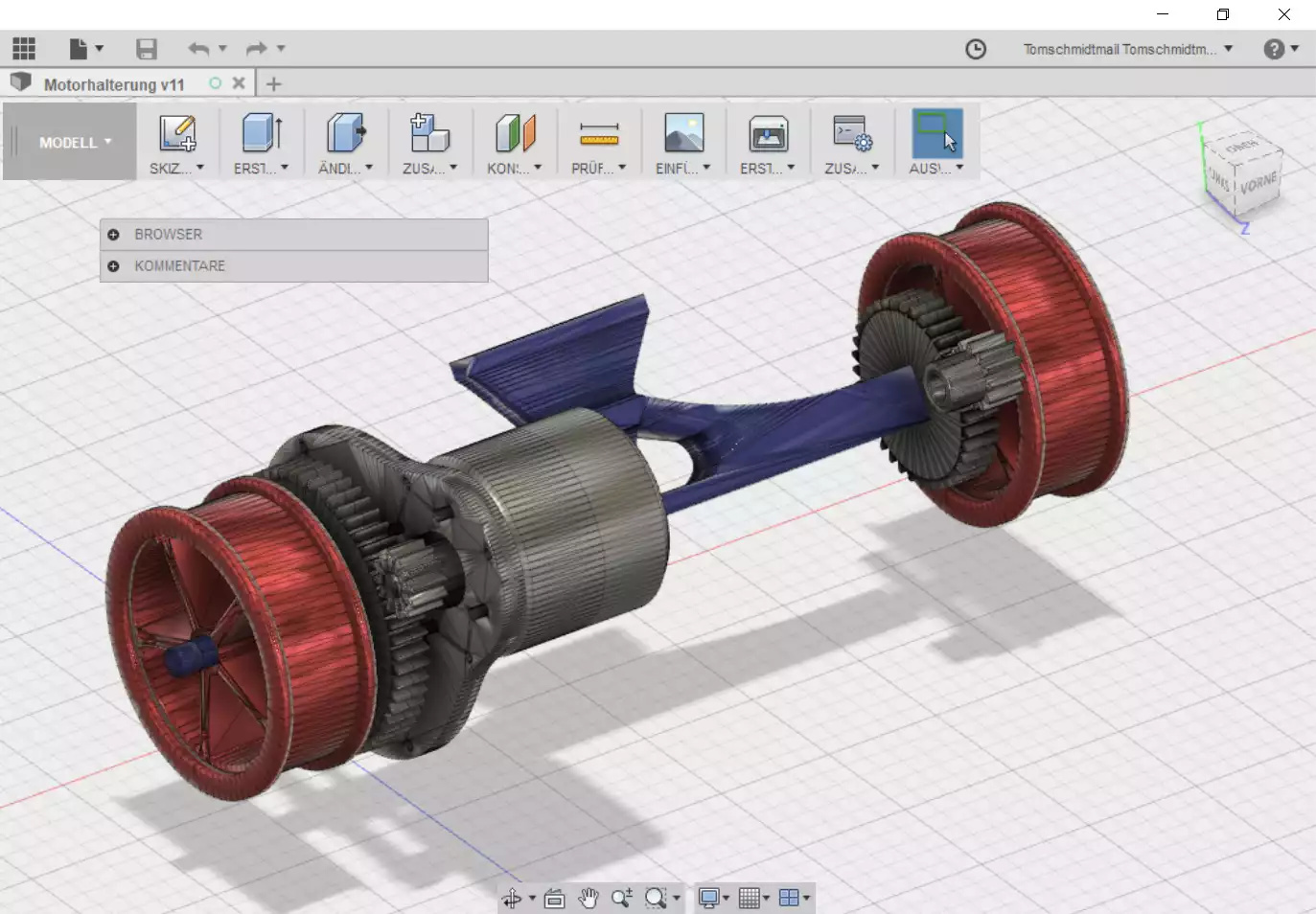
So i started up Fusion 360 again and ended up with this:

Lee uses custom made gears for his drive, but i wanted it to be compatible with readily available steel gears, mine are modul 2 gears so that i can use the same same spur gears as Nowind does.
This design would in theory allow me to convert it to a regular outer gear drive using a very small wheel gear (probably with gummies  ), which is why i made the enclosure detachable to in future switch between both modes of operation and their enclosures easily.
), which is why i made the enclosure detachable to in future switch between both modes of operation and their enclosures easily.
The cover for the big inner gear is still WIP, i wanted to wait until all dimensions are final and i had proof that it works.

This is the part attached to the wheel, there’s a 6mm spacer beneath and the screws are flush with the surface in the final version.
It’s a 55t gear with a 10t gear on the motor, so combined with a 130kv Overion motor - torque won’t be an issue.
I didn’t dare go more than 25% of throttle as of yet on flat terrain from standstill  (also holy fucking shit, foc + hall sensors is pure heaven coming from a vesc 4.12 sensorless longboard)
(also holy fucking shit, foc + hall sensors is pure heaven coming from a vesc 4.12 sensorless longboard)
Next thing to do was the material choice. Originally i wanted to use Polycarbonate for everything in the drive, but i found and used Taulman Alloy 910 which is a blend of polycarbonate and nylon.
I had to change my original Creality CR 10 Hotend to a Micro Swiss one to reliably reach 250°C and i think it works a treat. Printing one gear with 3.2mmm wall and top/bottom thickness as well as 100% infill takes about 11.5 hours. Also the printer hast to be in a closed build chamber for this filament to work best.
I used a big old plastic bag, works too 

This is the motor mount, it’s a fairly simple design with 4 grub screws. I melted some threaded inserts from Rampa into printed holes and they hold tight very well. It’s printed in PLA and i’m very impressed with how durable it is, but in the long run i will do them again with petg or polycarbonate. Since the gap between motor and truck is so small there aren’t big forces acting on the mount, which is why it holds up using only PLA.

No motorisation here, Officer 

This is a prototype for the gear cover (actually for the whole drive on the picture). I think it will be sufficient, maybe i will add a net or something in the middle.

I think it looks quite cool 
I think the shortcoming of this drive is the lack of precision you only get from professional cnc machines. On the other hand, my printer cost around 450€ with the upgrades i did to it so i’m quite fascinated with what i could achieve with that. I’m not sure if i need to file or mill the hanger flat, the part of the hanger it screws on is the flattest on the truck i think.
Controlling the Beast
This is more or less a sideproject, it’s mainly to learn stuff about arduino, coding, communication and such.
I wanted a trigger remote like the GT2B and chose okp’s design, the SPARKLE remote, as basis for this.

The amount of functions is nowhere near the remote @Wajdi is doing, but i like the ergonomics much better than the nunchuck style remotes. For now it only displays data from the VESC, including permanent distance tracking (which is totally wrong as of yet but i’m working on it), but i want to implement a simple menu to change power and stuff sometime. It sort of works right now but i’m not satisfied completely. I might get a regular GT2B for inbetween if i can’t bring this to a polished, working state soon.
Bonus feature: A dead man switch in form of cherry MX blue switch, which pleases the mechanical keyboard geek inside of me and provides an excellent tactile feedback when pushing it in.
##the rest
As of right now, the board definitely isn’t finished. I had 2 weeks off over christmas and new year of which i nearly used 100% of the time for the Board.
On my to do list are many things, including lights, a finished VESC enclosure (only printed the baseplate so far), finishing touches and prints for the drivetrain, getting the remote to work flawlessly and so on…
If that’s all done i will ride and ride and ride and ride to test the drivetrain. Obviously i can’t say how well it will hold up in the long run, but immediate failure didn’t occur today when i really pushed the torque so i’m quite optimistic. And then again, i can always just print a new gear.
I’m an electric engineering student so i don’t have any formal knowledge of gears and stuff, and i would really appreciate your thoughts on all of this and the board in general, what i missed and what could be improved.
Many thanks to all the following people for inspirations and guidance in form of their build threads here on the forum and elsewhere!
@NoWind @Duffman @Riako @Trampa @Pimousse @squad @okp (and probably many more, this forum is full of great people - sorry if i missed some great trampa builders, i read all of your threads!)
And of course special shoutout to @Rich for answering all my MTB noob questions over the course of 400 messages 
Here’s a glamourshot of a burnout, no point in shooting other videos in the dark so you have to believe me that it works
https://www.instagram.com/p/Bdp-VgZBgb2/?taken-by=der6fingerjo
 Thanks for sharing all of this genious thing and to inspire us again and like you said their is so mutch people here who inspire itch other ! Thanks to this forum
Thanks for sharing all of this genious thing and to inspire us again and like you said their is so mutch people here who inspire itch other ! Thanks to this forum  The setup looks perfect, maybe add a middle support like you said 1st and how it work yes
The setup looks perfect, maybe add a middle support like you said 1st and how it work yes