6s – assumed was 3.8v per cell * 6 cells in series = 22.8v battery
Ok so the diagram for what Is for my current setup?
yes-- with 25a battery limit & 80a motor limit per motor.
Ok, i think there was some confusion. The diagram is a mix between my current setup and what I want it to be/upgrade it to very sorry
For reference, whatever value this may be…
My gearing is heavily bias towards speed over torque, at 20/32 on 90mm flywheels.
I run 30A each vesc and have plenty of torque to get up steep hills, and I weight 200 lbs, and my board weighs quite a bit too.
I have a feeling, with 25A to each vesc, not weighing much, and geared for torque, you probably won’t be lacking the torque you need to get you up hills.
Hey, have you shared this Excel / spreachsheet calculator by chance?
Id love to play with it to run some numbers.
I run dual 5055 190Kv with 14:34 gearing on 80mm wheels, I can keep 30km/h up to 15% grade with 30a total battery current and 40a each motor, more than that I can climb up to 24% at 17km/h
I wouldn’t run more than 40a on 5055 motors since even with that they can get pretty hot
thats great to hear I really hope your right 
1 Like
also good to hear. some say it’ll work some say maybe not. I will probably go with it now. still hard to decide
yes i’d love to aswell
I do run dual 6374, but with a 5:1 gear ratio, even with the reduced torque from 5055 motors at 270kv, you should be in a very good place torque wise.
One thing to look out for though, is that with 10S and 270kv, your ERPMs at max RPM are 68K, well above the 60K limit. I’d suggest going down with your motor kv… Maybe around or under 230kv, and not going so high with your gearing… Maybe 4:1 with 230kv motors.
If you stick with 270kv and 10S, just know that at top speed you really do risk burning a DRV chip or two and faceplanting because of it. You can try limiting max ERPM in firmware configuration, but I don’t know how reliable that is, because if you coast over that going down a hill I’m pretty sure you are still screwed unless you set it to brake at a certain speed.
I just wouldn’t go there, and wouldn’t drop a 10S in place of a 6S when running 270kv. I’d make other changes, like motors to ensure you don’t even have the potential to go over 60K erpm on full throttle.
Calc.esk8.it
I wont be changing my motors for a long time I need to upgrade other parts first. I dont even have vescs yet. I currently use the eBay ESC which has been doing very well for me. aswel. someone told me to limit the ERPM to around 55k and in real world test I probably wont even reach that only if you use full throttle with wheels in the air
What’s your wheel size? And 10S right? I have a spread sheet that is simple to understand. 4:1 is hard to do since you have low clearence and/or low teeth in mesh on the motor pulley
You could reconnect you motor in Star to lower the Kv by sqrt(3) factor
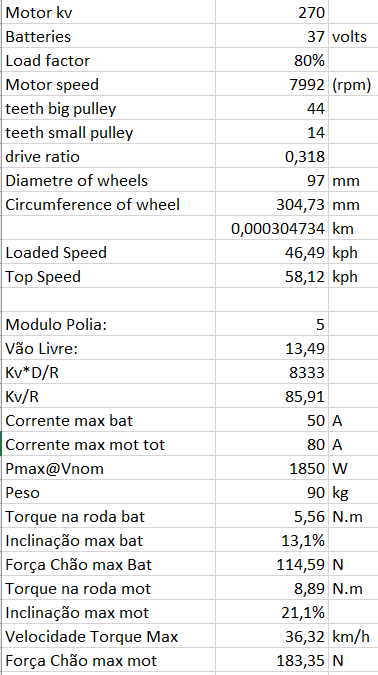
Put in please 97mm wheel size, 10s and im not sure for gearing ratio. according to this calculator http://calc.esk8.today/ 1:4 give me a top speed of 45km/h which I wont get close to. preferably I would like a 1:5(to give me 36km/h top speed) but then as you say I would have little teeth on the wheel pulley. maybe I could add a idler pulley?
Then again for a 1:5 ratio I would need a 60t pulley
The problem is not even teeth in mesh, this you solve with an idler as you said, but lower than 14T the diameter of the pulley is too small, the belt in bent more than it should and it will last a lot less
Here’s 1:4, looks good, top speed wise is the same gearing I use on my board, BUT the pulley sits a 4mm from the ground, even less if you consider belt thickness, unless where you live the road is pristine and no little rocks exist, you can’t use that
With 1:5 the wheel pulley would be bigger than the wheel
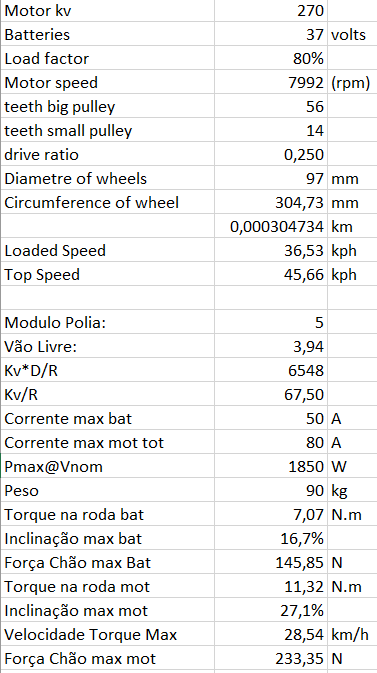
The best you can do with these motors is 1:3,14
You can’t really go bigger than 48 tooth on 97mm wheel with M5 pitch belts. The pulley is just too low to the ground. 48 is already kinda bad.
If you switch to M3 pitch belts then you can get a better ratio, but that introduces other problems. Almost no one uses M3 pitch.
Also to your main question, 25a per vesc should be enough torque for hill climbing with the right ratio and considering your not that heavy / not a top speed addict.
My dual esc has 3 speed controllers. Maybe if I just leave it on the lowest speed and pop it on to highest speed or middle going up a hill. I think I will leave my gears and everything for now and buy the new battery’s over summer
it looks like with 10S, 80a motor limit, 25a battery limit per motor on a vesc, you can reach roughly ~32mph (red line, bottom left chart, net thrust pounds, thrust minus wind drag force 2 motors)…
here is a comparison of 6S (22.8v – 19mph) vs 10S (38v – 32mph):

So if im reading it correctly I wouldn’t get that big a boost for climbing hills?