well if you have a low kv hub you’ll get top speeds well within esk8 applications. You can hit the power/efficiency sweet spot, but getting to that point from low/no speed is not as efficient.
1 Like
But if efficiency is solely determined by the rpm the motor is in a pulley system will simply move that rpm range over further to the left of the graph I posted. Lowering the motor kv would similarly bring the rpm range to the left. In doing that, lowering kv, if there is the same amount of copper and resistance they should perform the same. Lowering the kv generally increases the winding resistance though so…with the belt you can keep a lower winding resistance and have the torque while direct drive must increase the winding resistance to get the torque. But at the same time I read !!! Torque is equal to to heat if the motor is appropriately wound to its voltage!!! Meaning a 2000kv motor can put out as much torque to heat ratio as a 200kv if the voltage is right and its in its sweet spot as the graph shows. Lower voltage for higher kv. But this is still going to be less torque for a given temp increase than a pulley set-up That’s my explanation and hoping to hear what you guys think. A 90kv hub with the same winding resistance as a 200kv with gearing maybe
And what of a big hub motor. It’s winding resistance will be decreased. It will be heavier. And the motor alone will likely have larger loses at low loads but better on the heavy loads.
3 Likes
Hummm… I don’t really see your point… we have done some testing for the vesc-x this weekend in foc mode over a F1 racing track, with two totally different setup. One with hub and the other one was a single r-spec 6374, and we where pretty much following each other at 40km/h without any problem.

Here the two setup
Not sure what your speed test proves. this discussion is about efficiency. and I dont think one single drive rspec vs dual hummie hubs is a good comparison either.
1 Like
It is not only about speed, we still have push those motor for a distance over 7km, and why it won’t be a good comparison ?
On a goofy side note, I made this (incredibly detailed and technical) drawing of a carvon style hub motor that would drive both the wheels with 1 motor, something like this would be super cool.
1 Like
Carvon actually had a prototype board that had normal hubs in the front and a single 6374 motor that drive both rear wheels. I’m not sure well it would work during turning. I imagine the rear motor would only really drive one of the wheels while turning.
Why no one does that I don’t know A lot of room for an inrunner and would be easy to make. Have one powered wheel and one spinning freely on the powered axle. Can’t have both attached or steering wouldn’t work right. Could have both wheels regular and not thin polyurethane.
Yes, Of course, I am going to use numbers because it’s the numbers that define the limits of a system.That’s why the manufacturer provides this data. You can read the document yourself here: http://file.lasersaur.com/docs-thirdparty/The_World_of_Timing_Belts.pdf
Let me simplify this.
- The numbers in red box are RPM (10 to 14000)
- The numbers in the blue box are torque transfer ratings from the manufacturer (8.84 to 1.45)
- The highlighted numbers in black box are as follows
- At the top is 15 this is belt width - 15mm wide. (Most dual drives are using 9mm multiply torque by 0.6)
- Next number is 18 this is teeth of motor pulley (Most esk8 builders use much less, 15 & 16 teeth)
- The bottom is belt size, the smaller the belt the less torque it can transfer. (Most esk8 use the one I highlighted, multiply 0.75))
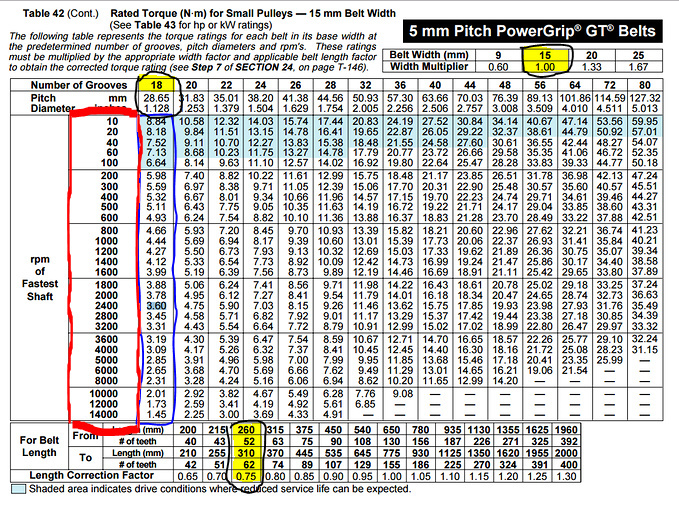
NOW YOU UNDERSTAND THE DATA FOR BELT DRIVES YOU CAN COMPARE WITH DATA FROM DIRECT DRIVE SYSTEMS
This is a chart for Jacobs Hub motors.
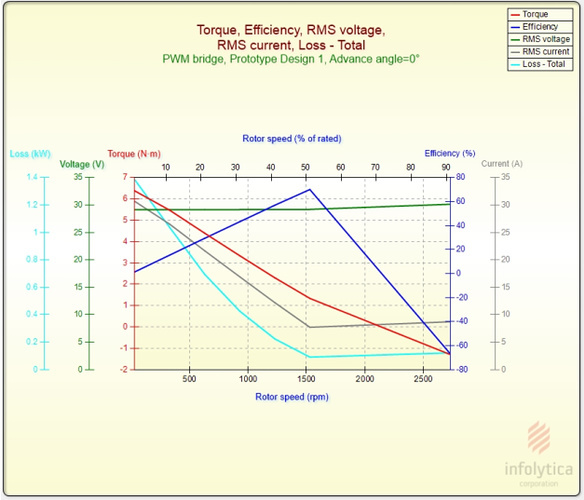
- Take a look at the red line, this is TORQUE
- Now look at the 1000RPM mark at the bottom - it shows 3Nm
- Now calculate the torque transfer limit for a 15mm wide belt drive system at 1000RPM with 18 tooth motor pulley.
- = 4.4Nm x 0.75 (belt size factor) = 3.33Nm
- Now calculate the torque transfer limit for a 9mm wide belt drive system at 1000RPM with 18 tooth motor pulley.
- = 4.4nm x 0.75 (belt size factor) x 0.60 (belt width factor) = 1.98Nm
At 1000RPM one Jacob Hub motor has 51.5% more torque at the wheel when compared to the max that can be transferred by a Belt drive system with 9mm wide belt - only with a 15mm wide belt is it equal.
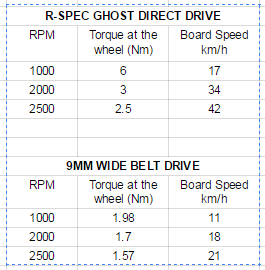
Now the coolest thing is that you can easily make a bigger hub motor, one with more torque. With our simulations for the R-SPEC GHOST direct drive we are seeing double the torque at the wheel when compared with a 15mm belt drive which are only being used by evolve atm.
What is even more exciting is how much more torque you have at higher RPM. Much more torque & much higher board speed when compared to 9mm wide belts.
1 Like
I appreciate the numbers, but this calculation does not take into consideration the wheel pulley. Say for argument sake you do use the 18 tooth and the limit in the belt ends up being 2Nm in the belt, but with the reduction of 2:1, so you have your nylon pulley in some flywheels, the reduction in gearing means 2Nm in the belt translates to 4Nm at the wheel. Where is that considered in these calculations?
Why not address my points with an intelligent counter-response? or even a dab of evidence? Instead, you use some slander, now that is a great example of misdirection! bravo.
So please let me correct you slightly, Jerimiah.
Enertion changes what Is being sold based on data & findings from doing R&D…We always have & will continue to provide our customers with the latest & best esk8 technology, we won’t sit on our hands waiting for others to do it for us.
So please don’t get confused by our offering, the data is available if you choose to look at it. You are a super smart guy, you can easily understand these findings that have been presented and if you are really smart you will soon be offering direct drive too.
Direct drive is superior, there are no major mechanical bottlenecks in our drive train now, the final frontier is heat management & we are also innovating in that area with our patent pending technology. We won’t stop optimizing.
1 Like
As you’ve said before proof trumps all calculations and theories. Let’s see a Raptor 1 vs 2 comparison full throttle up a decent grade hill.
2 Likes
don’t worry, you will see it.
2 Likes
I am an electric skateboard designer & innovator, I must design within the constraints of the physical limitations presented by our skateboards, with the primary goal to maximize performance… it’s very obvious that skateboards don’t share the same design constraints as other drive train systems… they are very unique actually.
It would be very closed minded to accept that becasue other things use belts drives, they are therefore perfect in all other applications.
just take a moment & run the numbers and you will soon learn that narrow sightedness is not a great attribute for an aspiring innovator
1 Like
I’m super exited to see the results. 
Yes, assuming you also ignore friction losses which i don’t have data on, you can keep multiplying the torque with gearing/reduction, however, the bottleneck is still at the drive pulley. The design constraints are still there. Furthermore, It’s also hard to get a lot of reduction due to the wheel sizes we commonly use. You can do what boosted boards did & go with 3mm pitch, however, the torque transfer of those belts is lower again.
I think the best bet for Maximum Torque belt drive is 15mm - 5mm pitch (or if possible wider) belts & maximum reduction possibly using idlers to ensure 6 teeth in mesh (however, idlers are not recommended, see excerpt below) So maybe like 13 to 40 reduction ratio to get approx 3x the torque at the wheel.

With 3x the torque at the wheel, so approx 10Nm at 1000RPM, you are now seeing more torque at the wheels when compared to the my hub motor simulations, of course, a hub motor can just be fed more current too (which we will be testing the limits of this on our dyno) meaning the only bottle neck it faces is how quickly you can dissipate heat. Heat pipes & liquid cooling is an option.
So this belt drive system is not impossible to build, perhaps a bit impractical for an esk8 & slightly outside the recommendations of pulley drive systems. Actually, we see this system commonly on eMTB builds:
This is an example of what you need for your esk8 to match/better hub motor torque output.
1 Like
Isn’t size also a bottleneck? By putting a motor inside a wheel you’ve set up a losing economy wherein to get a bigger motor you have to sacrifice thane thickness. UNess you do Jerry’s new design that is awesome innovation… outboard hub connection solves cooling and wheel selection issues right? And efficiency decreases with heat, you might could improve heat management in a hub but will you ever beat an outboard motor stuck to a heat-sinking mount (like ollinboard new one with huge cooling fins)
Just for the record there are two major heat generating mechanisms in electric motors. The first is resistance in the windings which become hotter and hotter as current increases. The second is magnetic Flux which causes heat build up in the stator stack. The higher the voltage,the stronger the magnetic flux. Building a cool running motor is a balance of voltage and current.
For example my father is an electrical engineer and his company designs high voltage generators and motors. One time a technician accidentally ran a motor rated at around 13,000 volts at almost 23,000 volts. The voltage was higher so less current went through the windings, but the higher voltage also created a much stronger magnetic Flux which cased the stator plates to get so hot they fused together and caused the entire rotor to seize.
Higher voltage != less heat (directly at least)
3 Likes
The whole topic about the higher power of outrunner is pointless to me. Who of us is driving his dual with 70 max battery amps on each vesc. Because only then you would use the max potential. And that would be around 6000 watts of power output. I guess the most of us don’t use more than 2000 watts and think that the board is already very powerful. By the way. 1000 watts is already enough for 50km/h
3 Likes