I just noticed: your motor is set to “Sensored mode” that’s not correct. What you want is hybrid! That means sensored for low RPM and switching to sensorless at higher. Sensored mode does not work well at high RPM. This might be at least part of the problem.
And I second increasing battery amp to ~40 A. But this is not the issue here.
Sensored mode, while not efficient at high speed, still works. It should not be limiting his duty to 40%. As he’s having issues on hills, I am leaning toward it being an insufficient current problem.
I’m not so sure about that. When you look at the telemetry it is really the motor amps that run into a plateau. It’s not the battery amps.
And I missed that he’s got 2 x 20 A, which is not that bad.
Let’s see what switching to hybrid mode does. I don’t know that much about it, but sensored mode is much louder and less efficient because it doesn’t get the current and motor phase aligned. Meaning switching happens at the wrong moment. If that leads to spikes and noisy readout, I could imagine that it triggers the 45 A current limit prematurely, and that’s what’s becoming the bottle neck here.
PS: On top of that going to hybrid will give the same output power at much lower battery current, so this issue might go away altogether. But I’m also curious what will happen. I only played with sensored mode on the bench, never took it for a ride.
Sure it can limit DC indirectly. Unceasing DC here would mean increasing current, which is prohibited by another limit, in this case everything points to motor current being the bottle neck.
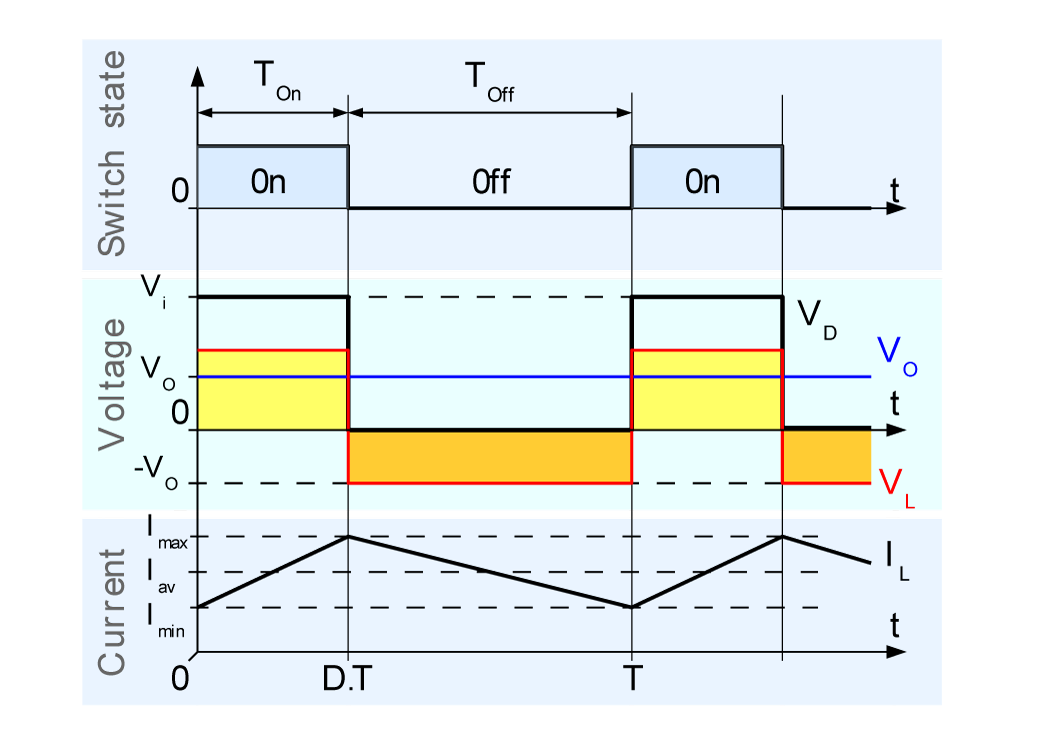
the duty cycle lowers the effective voltage of your battery to the voltage necessary to achieve the desired motor current considering the present back emf voltage caused by the spinning magnets.
50v pack * 50% duty = 25v effective to the motor
at 0rpm:
((50v pack * 50% duty) - 0v bemf) / 0.1 ohm motor = 250a motor amps
25v effective * 250a motor current = 6250w electrical watts
Oh, yeah you’re right. I just got some major deja vu from my discussions with @devin and didn’t read your post properly, sorry . I already saw him explaining me that the current here is “bucked up” from 36.9 A to several kA and that the power is several 10 kW…
Anyway, you’re right and I was trying to say the same thing more or less. Duty DC is here limited indirectly by the current…
It might be possible for a few milliseconds at very low speed with a low resistance motor and 100% duty… though a vesc is fail-safe programmed within the firmware to limit motor current below 120a.
((50v battery * 100% duty) - 0v bemf) / 0.025 ohm motor winding = 2000a motor current
2000a motor current * (50v battery * 100% duty) = 100000w (100kw)
We’re picking this up again . So be it…
Yeah, voltage is converted to amps but nowhere near the way @devin imagined. It’s the story of having the current in a loop with an inductance (aka the motor) and the current basically going “in a circle” without going up against the battery voltage. This is the reason why motor voltage can be much higher than battery voltage.
Nope, that’s exactly the point of duty cycle: to NOT have the same power at the end, but less.
Nah, that’s not what @devin was talking about. I don’t recall completely but I think his “theory” was something like at 1 ohm and short you get 42 A at 42 V = 1762 W, and 100% DC, so at 10% DC current gets “bucked up” to 1/10% *42 A = 420 A motor current and therefore 420 A * 42/10 V = 1764 W or something. It was complete nonsense. The idea was that there is always the same power leaving the system, which makes no sense whatsoever.
 Sorry, I couldn’t resist. But that’s not how it works.
Sorry, I couldn’t resist. But that’s not how it works.

 thanks!
thanks!