The Unity fork of VESC-Tool mobile has the help files excluded as far as I can see.
In the original VESC-Tool you will find a lot of info clicking on the ? or HELP.
The mobile version for Android is nearly a full VESC-Tool but with a different UI structure.
Benjamin also integrated the HELP files into the mobile VESC-Tool to help people find some basic answers.
For good reasons he didn’t integrate the throttle curves into the mobile frontend though.
I have no clue why the Help files have been stripped from the Unity Fork of VESC-Tool mobile.
If you need answers you can always go to the matching setting in VESC-Tool or VESC-Tool mobile and click on the ? or HELP. You will see that it is easy to find the corresponding settings in the official releases.
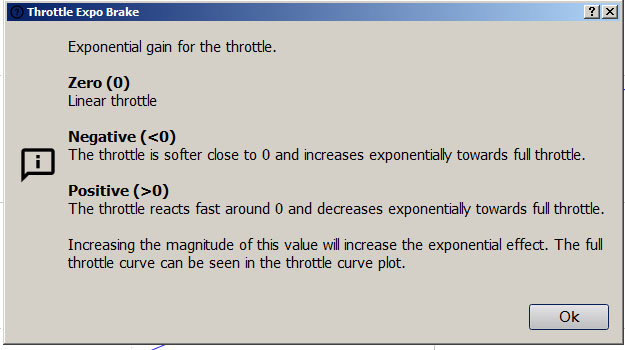
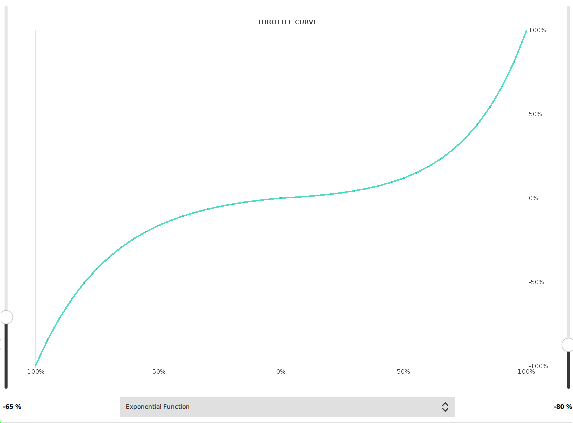
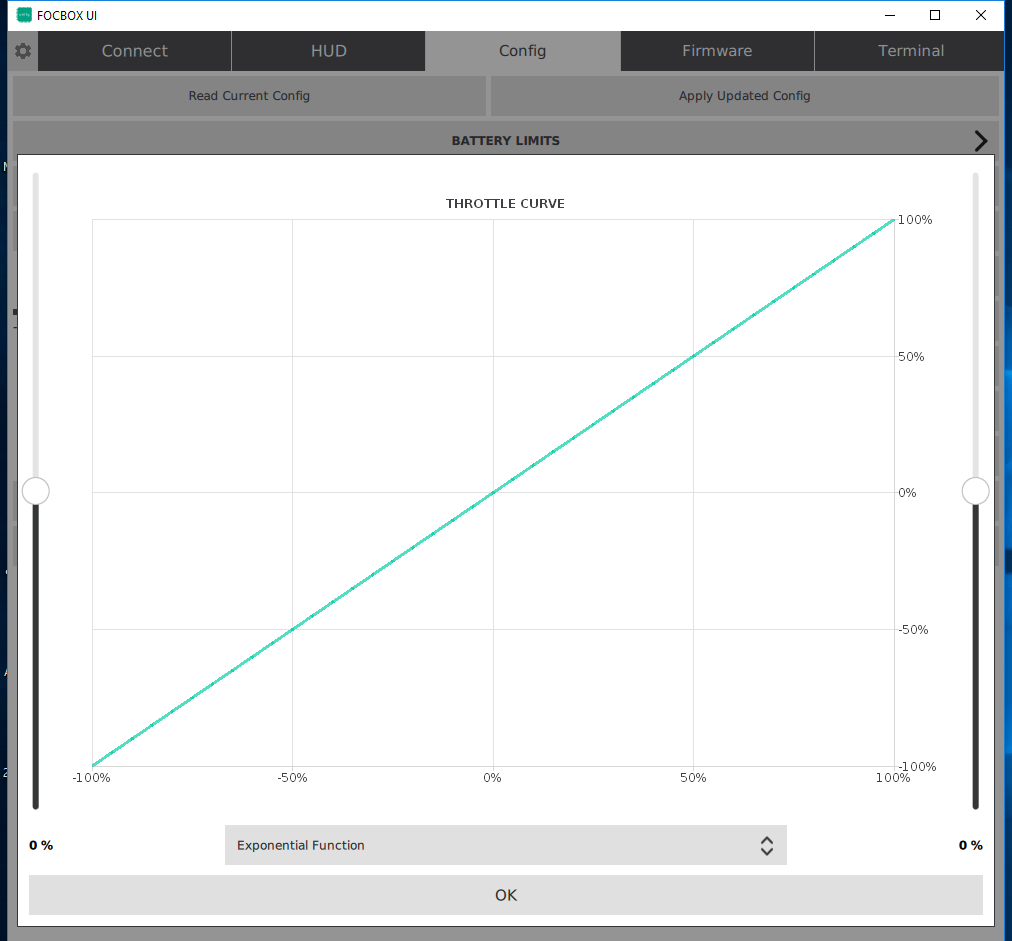
X-Axis = throttle value
Y-Axis = output value
You can choose polynomial, natural and exponential functions.
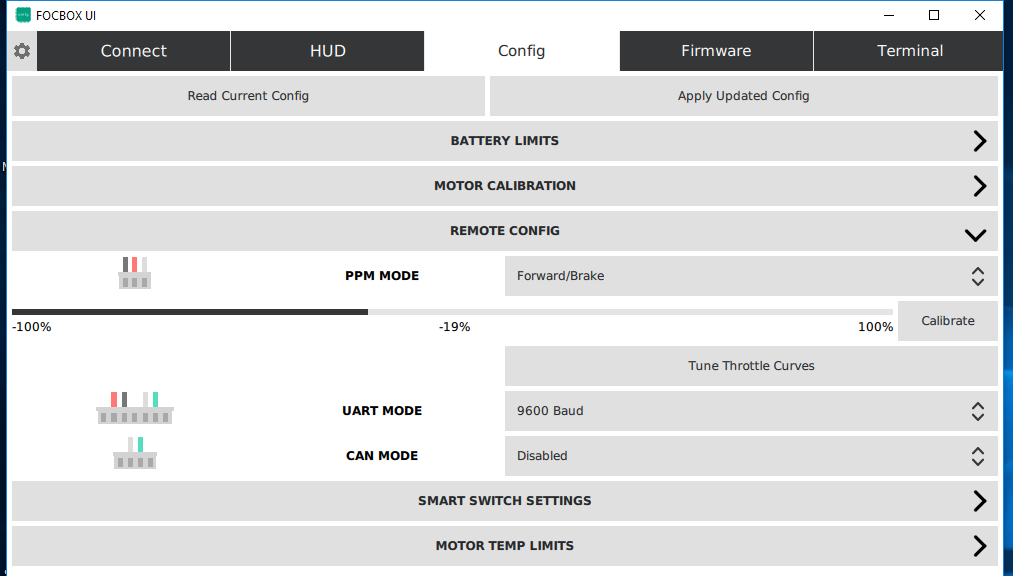
Most of the time it is better to leave the throttle curves untouched and use the pos/neg ramping time to soften or sharpen the throttle response. This setting can be found in App Settings >> PPM >> General.
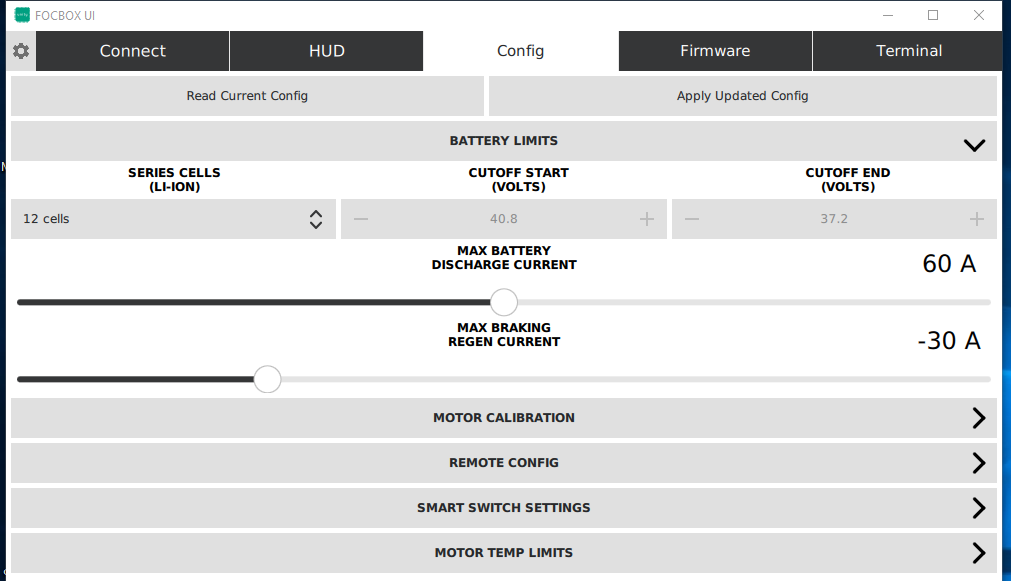
The most important thing that has an effect on the throttle response are the Current settings for Motor Max, Motor max Regen, Battery Max and Battery max Regen. Using symmetric settings for Motor and Battery Currents makes your vehicle respond most linear to the throttle stick.
Bad example: Many people have used very high Motor Max Regen settings (-80A) while using very low Battery Max Regen settings (-10A), thinking that their battery can’t handle a short inrush of high Amps. This will result in very very weak brakes at speed which get very very aggressive when you slow down a bit. Users have then tried to compensate that extreme non linear behaviour using the throttle curves, not understanding that they should rather have used symmetric settings for Motor MAX Regen and Battery Max Regen ( eg. -30A and -30A) to resolve the matter. In such a case the curves will not really help to resolve the issue of weak brakes at speed!
Conclusion:
It is important to have the most relevant settings right before trying to use a second set of “expert” settings that influences the behaviour again. If your Motor- and Battery Current settings cause a non linear response to your throttle input, you start to overlay curves with curves when playing around with throttle curve settings. That is extremely uncontrollable.
This is why Benjamin didn’t integrate the throttle curves into the more simple mobile UI.
Throttle curves are not the most useful feature in skateboarding. You can use them to fine tune your setup, once everything else is setup to react perfectly linear. Two shunt designs like VESC 4 and derivates do not react linear to the throttle input by design! Using the throttle curves can make things worse, especially in the range between 60 and 100% throttle.
I am having trouble “taming” my new build with 12S4P and 6369 200kv motors. The board has a tendency to throw you off the back if you accelerate too quickly. Maybe I shouldn’t have named it “Hellboy.”
I have fooled around with throttle curves, but also read the post from @trampa carefully when he discusses PPM and Motor / Battery Max / Regen. Currently I am at the default FOCBOX Unity settings of 60 and 30 amps,
Is there a different setting I should try? I need a better understand of what the current settings do and what baseline / best practices are helpful setting up Unity for a custom board.
I am using the Hoyt Puck for the remote. I would say it is very sensitive. I am an experienced skater, but for example, yesterday I was going slowly and maybe jiggled the remote wheel a little and wham – on my back. The board can do this at high speed too, although I am more diligent there.
@johnnyMeduse yes, there are 3 modes, I have been trying that, I tend to end up in mode 3 (fastest) because of hills…
@blasto I will try option 1 fur sure. I wish I had detailed explanations on what those terms mean exactly. For example, where is / what is the PPM section?
On the throttle curve, the suggested curve above seems to push the acceleration problem into faster speeds. Instead of an explosion at 5 miles per hour, now I get one at 20. I think this is what Frank meant by saying the power curve was of limited usefulness.
Keep in mind the throttle curves input is amount of throttle not speed. But yeah I like to keep mine at -10 %, -10%.
You ran the remote config→calibration in the setup to get min and Max for your remote when it was in the fastest mode? This might be your problem I have tested a hoyt remote here and the timing of it was a bit strange. I’ll be adding some more notes/steps to guided setup with the next release to explain more things quickly without walls of long text.
If you ran min/max calibration in a slow mode with the remote it could definitely mess up your sensitivity.
If your motor has a thermistor in it for measuring temperature then beta is just a property of that thermistor. See here:
If your motors don’t have a sixth wire coming out of them plugging into the Hall port don’t worry about it. If they do and you don’t know the beta value contact your supplier. If they don’t know you can stay with the default beta value, disable motor temp throttling, or run some experiments to determine beta on your own