Hey everyone!
I’d like to present my first build. I learn’t a lot, both from research and error, and overall I’m pretty pleased with the result.
PARTS LIST
- Landyachtz Evo Falcon 40
- eBoosted enclosure
- Dual Torque Boards 6355 190KV Motors
- Dual Torque Boards VESC
- Marsen Energy 10S4P (30Q)
- Bestech BMS
- Mboards anti-static power switch
- Mboards battery/voltage indicator
- Caiber II trucks
- Torqueboards 97mm Flywheels
- Bones Race Reds bearings
- Torque Boards ABEC pully kit
- Eskating eu motor mounts
- Eskating eu pulley cover
- Trinity angled riser pads
- HM-10 bluetooth module
- Flipsky VX1 remote
THE BUILD
After falling in love with the design of the Landyachtz Evo Falcon, I didn’t hesitate in deciding to base my build on it. The deck performs just as well as it looks providing stability at speed whilst still allowing for comfortable carving. Learning that @Eboosted made an amazing enclosure for it absolutly sealed the deal. The enclosure Alan made is truly a work of art, it fits the deck like a glove, has enough room for all the components and looks amazing all at the same time.
The battery I used is a 10S4P 36V 12000mAh made locally here in WA buy Marsen Energy. The quality is top notch and construction fast with a three day turn around. Attached to it I have the Bestech BMS bypassed for discharge.

Considering this was my first build the electronics were quite intimidating at first, but after some decent research and planing I managed to get it all together. I ended up removing the connectors between the switch and VESC soldering the wires together to simplify the wiring, and secured all the parts using velcro strips. I ended up having to cut the end of the enclosure off as the motors had zero clearance.
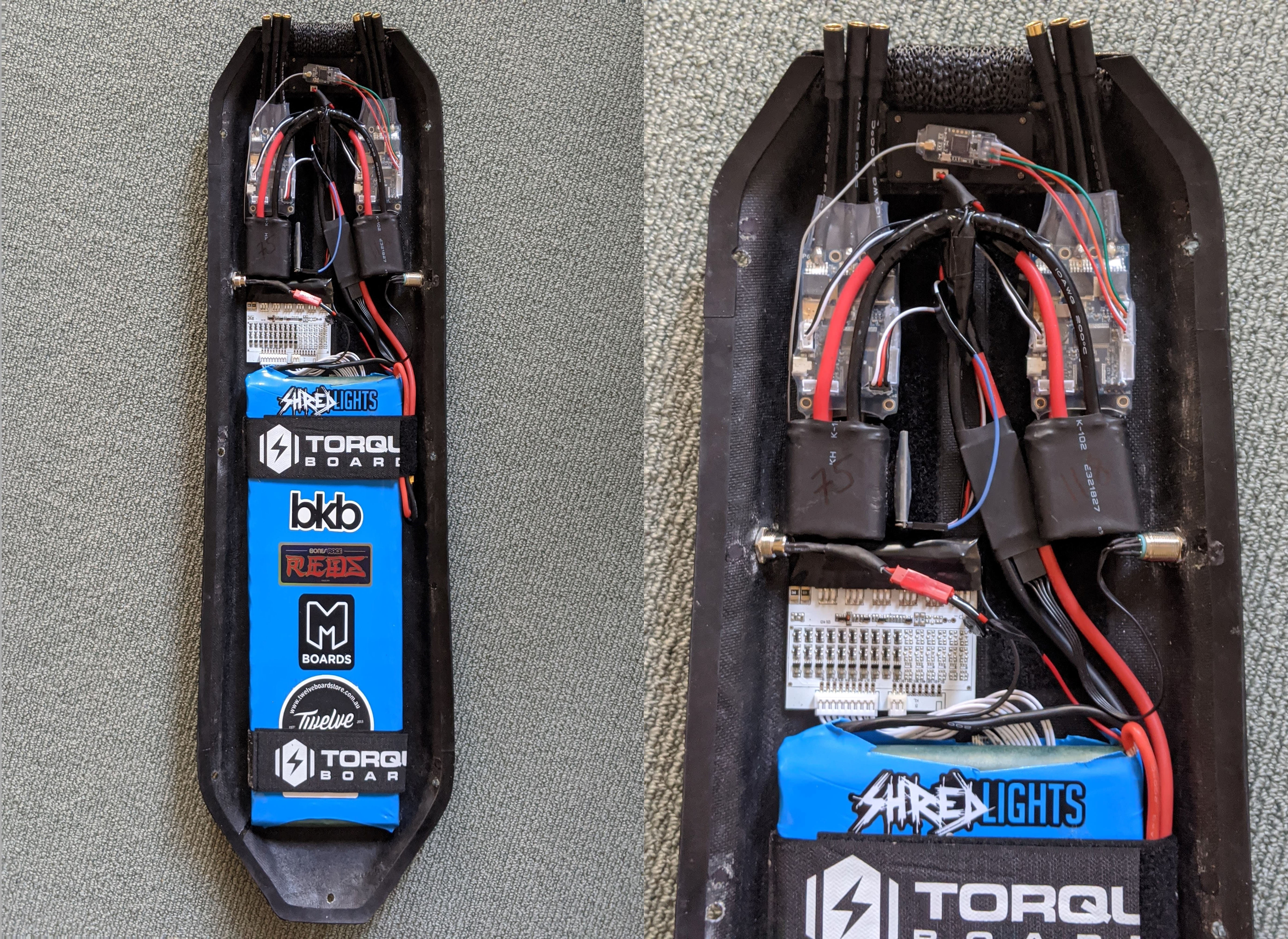
The motor set up was also quire a challange. The motor mounts from @fottaz are top notch and fit the caliber trucks perfectly, however they do position the motors quite low resulting in minimal clearance. The angled riser pads did help, but as mentioned before I did have to remove the end of the enclosure. Combined with the massive 97mm wheels from Torque Boards the buisness end of the board turned out nicely. The rest of the build was securing everything together and although mistakes were made along the way I’m happy with the over all product.





PROGRAMMING
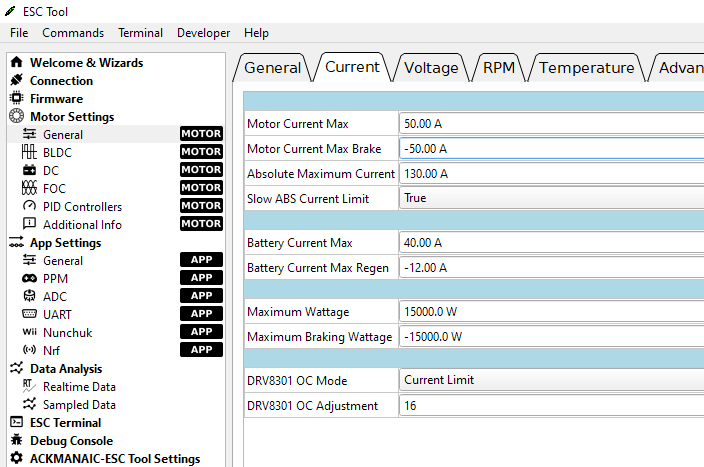
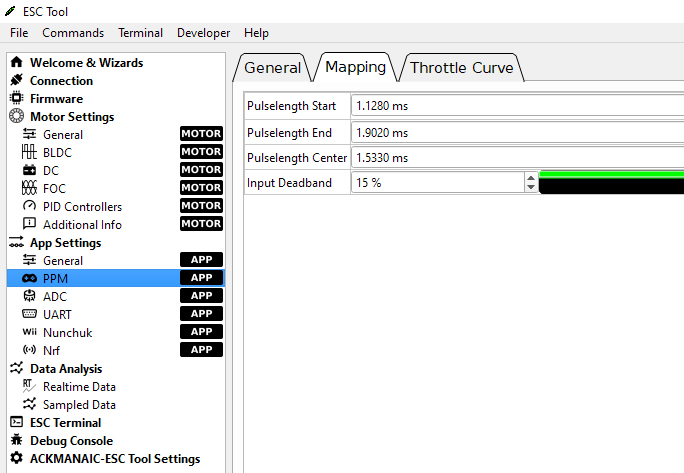
For the VESC programing I used the software by @Ackmaniac. Here are some screenshots of my configuration. Any feedback would be appreciated as I’m still not 100% sure on the settings. One issue I’m having is that the battery percentage varies between the remote, battery indicator and app.


 A small upgrade you can do in the future is going up a notch and changing the battery to a 12s4p which will transform the whole driving experience, it will be only a matter of growing bigger balls cuz the experience will be breath taking. Btw what gearing are u running?
A small upgrade you can do in the future is going up a notch and changing the battery to a 12s4p which will transform the whole driving experience, it will be only a matter of growing bigger balls cuz the experience will be breath taking. Btw what gearing are u running?