Oh woops xddd I can’t believe I missed that. My bad LOL Your build is epic, do you experience any cutouts at all? I have been experiencing some on start up torque (BLDC) and it gives me an over current fault.
Great build and inspirational for me as i’m currently planning a mini mountainboard for my 10 yo. Don’t mean to preach to the converted but have you correctly meshed your gears? Over tight gear mesh will cause drag and can blow the vesc.
1 Like
Hm… none so far… Feels like any of my other dual setups in terms of when power kicks in and all.
Great that you can have some reference to build yours for you kid. Will be an awesome project! Also the smaller skateboard decks will fit their tinier feet better than a regular mountain board.
Good advice about the meshing. My gears have some backlash provided for, definitely not too tightly meshed. This is my 4th DIY geared drive (everything from single drive 90mms to dual drive 8") so it’s definitely not the gears.
Also the noise when they are improperly meshed especially when too tightly is very loud, you will know it immediately.
1 Like
Anyone knows if I change from 15/67 to 20/67 will I be drawing less amps at the same speed?
I know I will get a higher top speed but I am not interested in that, I also know I will get less torque but with dual drives I think I should be fine. I just want to know if I get more efficiency at low to moderate speeds.
Yeah figured you’d probably know but sometimes its good to point things out just in case lol i’ve been saved from myself a few times now.
1 Like
Okay so I made it 20km exactly and my board cut out at the set 30V… Average speed was 17-18kmh. Max I think I only dared to go 23 or 24kmh. Last few kms I was going super slow to try to get back home. But alas I had to do the walk of shame. Luckily the board trollies very well.
I noticed with the tube replaced the amp draw was more acceptable, 4-5v for maintaining cruise.
All in all… I am quite pleased. Range is just enough for my usual routes and I can get a wee bit more by dropping the cut off voltage down to 28V…
1 Like


Let there be light!!

Incidentally light allows for board to stand upright…
5 Likes
Wow, it’s so weird like @Flashgod224 I got many trouble, under 10s bldc … (only 20A Batt and Motor Max and got Over intensity). And got Over Current uphill with more Amps sets. I will try those with FOC and sensored if it could work … but it seems not …
Thanks for all your sharing Ervine ! Its a great inspiration !!
Oh this is strange… Where did u see these errors? I don’t have a Bluetooth dongle setup so I don’t know if I am getting any errors.
But I did clock 20km without a hitch.
I did however downgrade the firmware to something that I know works for my telemetry remote.
I figured out how to counter the errors, it’s by using sensors or using FOC. The VESC’s can’t handle those over current faults so if you just increase the efficiency it will work flawlessly. I have been on a 50km test and it’s working fine on hybrid for now. I plan on using FOC when I get my Hummie deck.
1 Like
haha … it’s why I can’t get one of the both work sensored (even swapping motor and detect again the one ok wont work as slave and etc … grrrrrr). I will retry all, reupdate de vesc, reparemeter all reswitching motor etc … maybe it will get get sensor ok and work beter after that … but 10s is the problem, I had prepared all as my lipo pack in 12s … (10s5Ah VS. 12s16Ah …  )
)
Did you run 12S on the dual 4.2 ESCs? If I am not mistaken they don’t like to be pushed to 12S, 10S is max…
Sorry, I must surely misunderstand,  I was just saying that just the fact that it is not compatible 12s is penalizing because I had everything planned for that … and that I find myself having to find an old pack 10s (with only 5Ah…).
I run it 10s like they recommend me to do.
I could run them fine if I’m cruising cool and not stressing the trigger … but there is not fun or power
I was just saying that just the fact that it is not compatible 12s is penalizing because I had everything planned for that … and that I find myself having to find an old pack 10s (with only 5Ah…).
I run it 10s like they recommend me to do.
I could run them fine if I’m cruising cool and not stressing the trigger … but there is not fun or power 
You’ll need the dual VESC6.6 for that I suppose… 10S works fine for me, I have a 12S board that runs on Focboxes that I never really utilise to its full potential.
first of all, love your work. Great design concept with the gear drive using 3D printed parts.
I really hope you can share the files when you have completed the testing!
Just wondering what the minimum distance from the centre of the truck to the centre of the motor mount is to see what other motor mounts would work with your design? Such as the well priced @dickyho mounts.
I assume as the mounts are quite short they wouldn’t work pointing out the back to the board?
I wish I was as good at designing as you. Hopefully over time I can learn these programs a bit better.
Hi there, unfortunately I am not in town so I can’t measure it.
I actually wanted the mounts to point inwards in this case to keep them out of sight. I think it might be possible to point backwards but I am not 100% sure.
Hi Mate,
no worries. Are you able to give it a measure when you are back. Just want to see if the cheaper mounts could work.
I can understand why you wanted them to point inward as it does keep them out of site. I’ll have to do some of my own testing once I have the measurements to see if they will work outward as it gives a bit more room for batteries and if possible get the motors a bit further away from the ground.
amazing design work on all of it.
It’s a tricky balance, if your motor is mounted further from the axle you will need a much bigger gear which changes your gearing ratio but also makes it closer to the ground too.


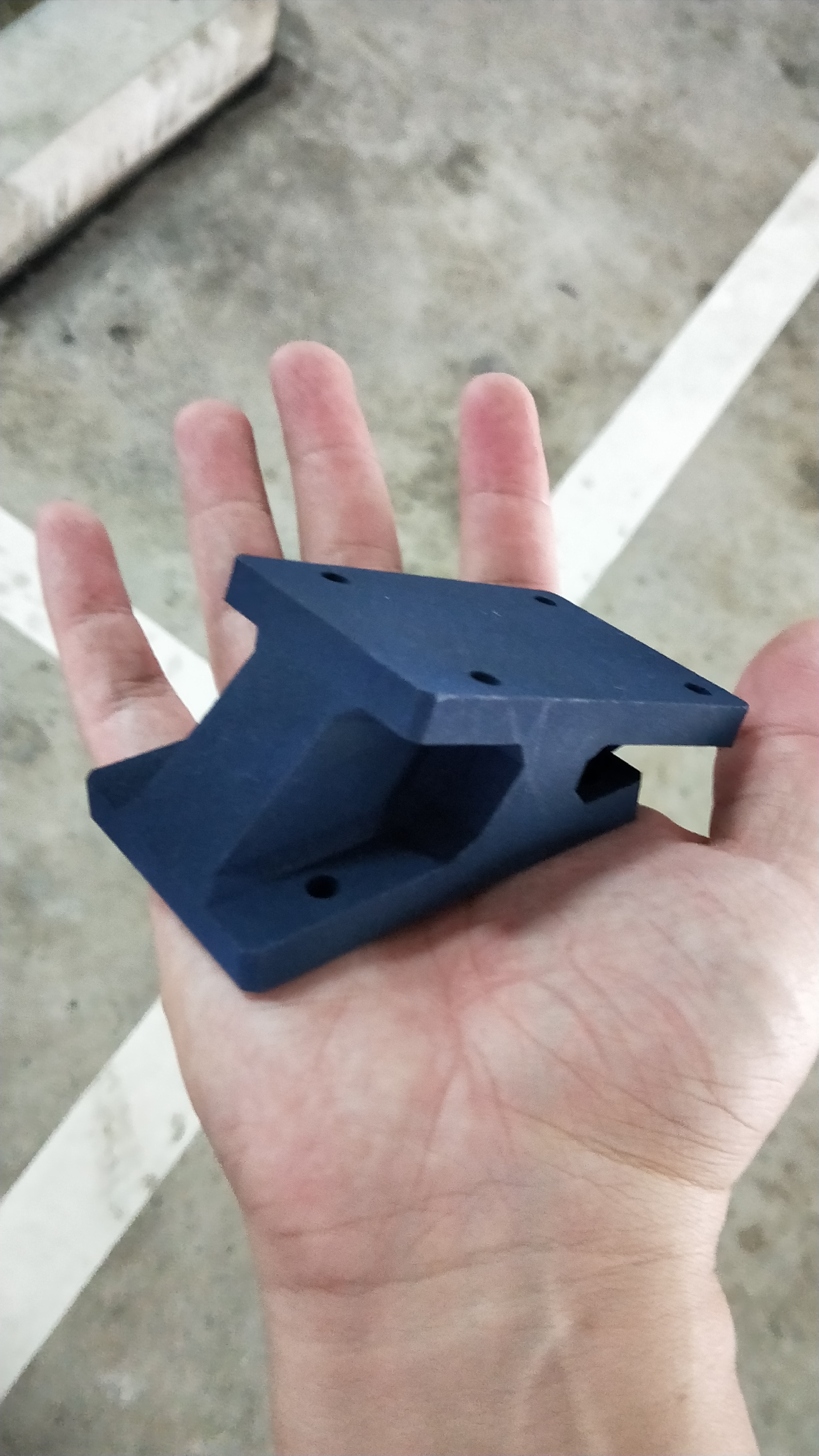
Upgraded to HP fusion jet prints… Can’t wait to give it a good test ride!!
12 Likes