Hello!
I thought i will share my build also. First i made an electric bicycle. I made nice 3D-printed parts and tweaked a lot. I eventually bought an Maytech VESC for it. Ultimately, i decided that maintaining the electric bicycle was too much a hassle.
Since i had a VESC, i thought that why not to build an electric skateboard, it’s at least easier to maintain and a lot lighter.
FYI on this point; All the skateboarding i have had is about one ollie or something with my friend’s board when i was a child. Despite of that, i have learned now quite fast how to handle it 
First i made an test build. Cheapest board i found, some cheap noname parts, LiPo batteries that my friend gave, and a 3D-printed boxes. After figuring why i can’t roll couple of meters longer, i rotated the trucks the right way around, and yes, what a feeling cruising streets, and even at decent speeds!
(What a horrible battery quickly built. 6S2P from 2,2A cells)

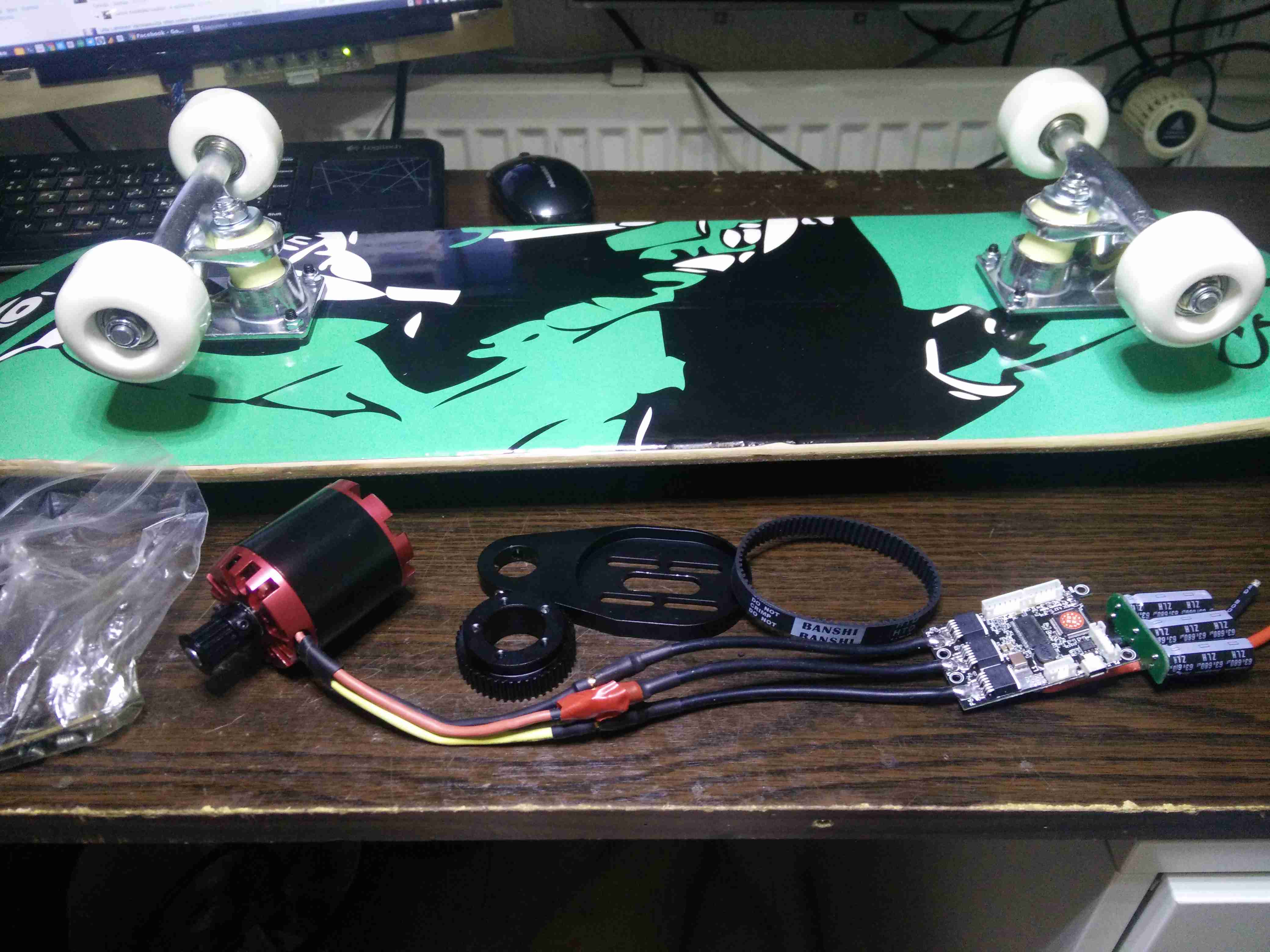

When that experiment was successful, i made my own board:
The most minimalistic press i could find while browsing the internet. And the board is made from three layers of plywood.


I buried the power cables. For the future builds, i don’t do that anymore because it is actually useless. Was good idea at the time though.
Applied cloth and resin. Nice smooth surface. My “art” is more like abstract, because i usually fail to pick any cool picture or something 

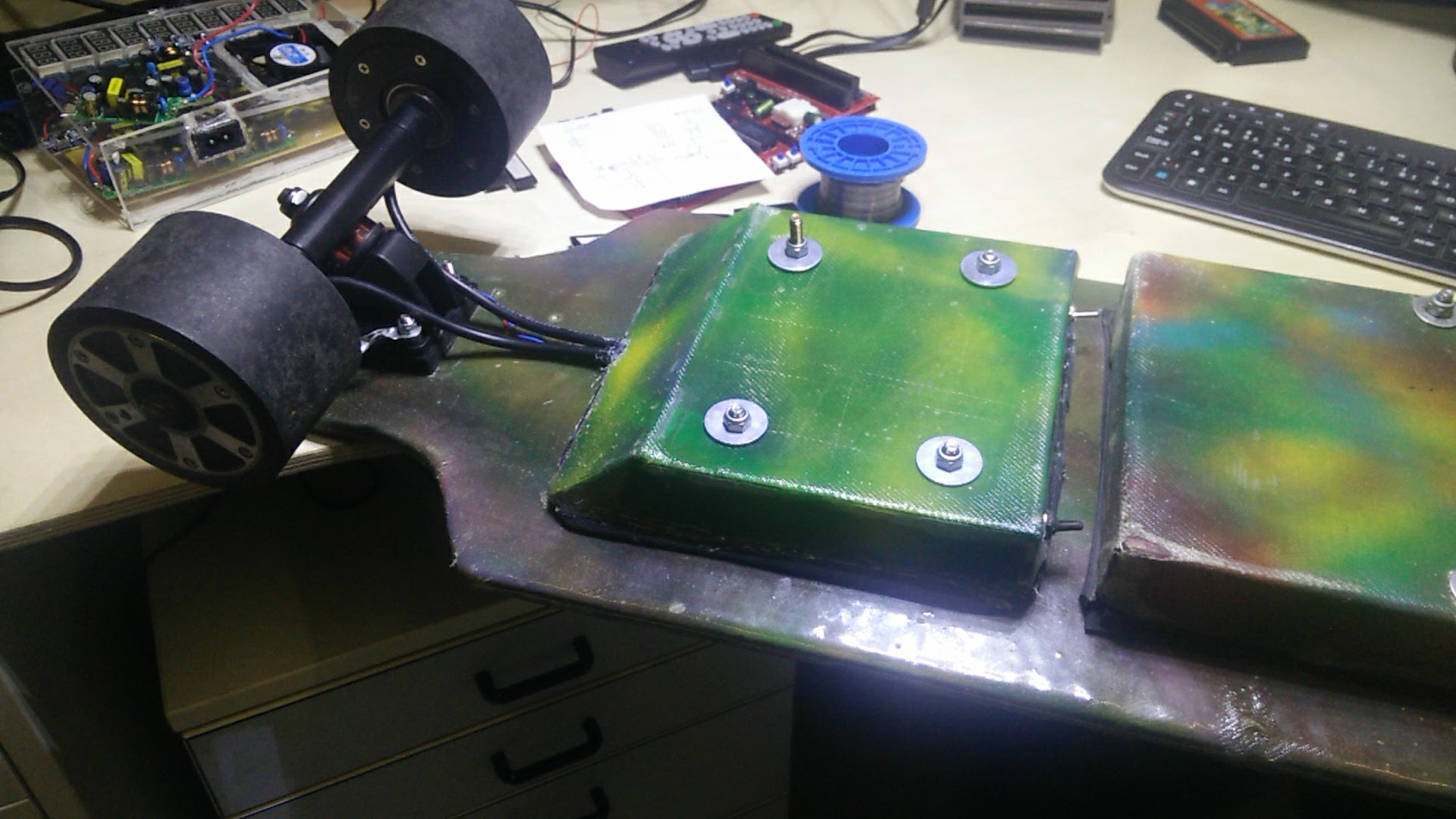
3D-printed 10mm risers, because the motor angle was welded too close to the board.

Ready for test ride!

First motor mount was very good, except way too thin, 6mm aluminium. It got bent very often and killing the belt.

The second mount did not bend at all. But i had different problems. It was welded too far from the wheel, so needed to install the small pulley further from the shaft. The small pulley tightening screw got loose, and got friction-welded on it’s place, whick was too close to the motor mount. I tried to compensate that by raising the bigger pulley on the wheel, but that brought more problems, like wobbling. And the belt got still worn out only after every 20km trip.

I moved back to the slim mount, and what i learned from the thick, i applied to this. This is the ultimate solution. Two bearing pushing the belt on both sides. It just works and the belt is happy.
I also made a support metal from the slim mount to the middle of the truck, which keeps it in place and also gives moderate protection for the motor.

I got 20 pcs of 5Ah LiPo cells, and wired them as 2P10S making it 10Ah battery (360Wh) I don’t know what is this sheet material called, but it insulates well. I wrapped it all around. The cell terminals got pre-welded metal strips, instead of other terminal being just aluminium. I connected them with nickel strips two-fold, bend tight, and soldered.

Here’s the battery with a balance-connector.
As thick wires i could fit.

I don’t have any picture of the controller i had in that board, but here’s one i have in another board. Maytech VESC with NRF-tranceiver.
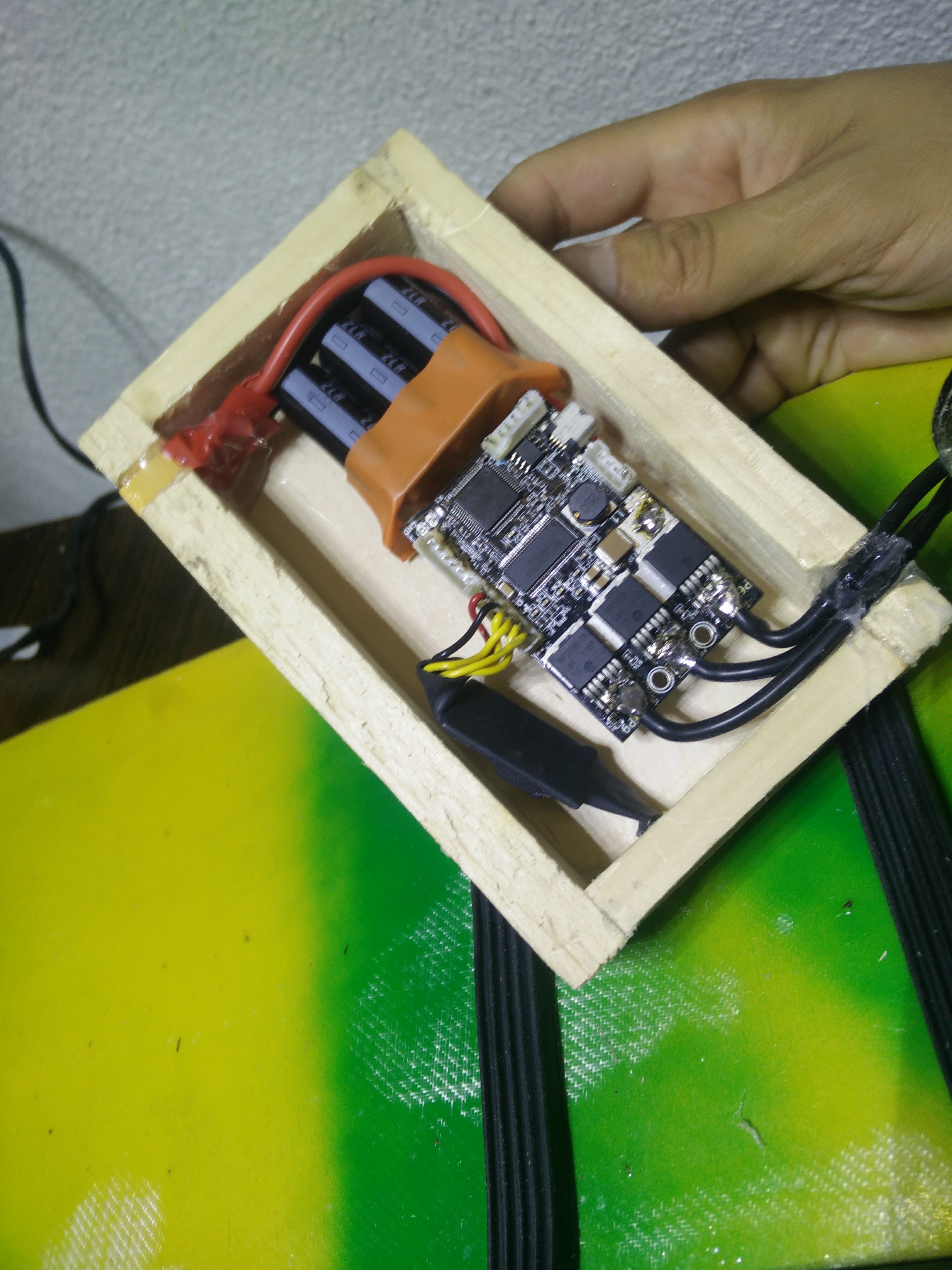
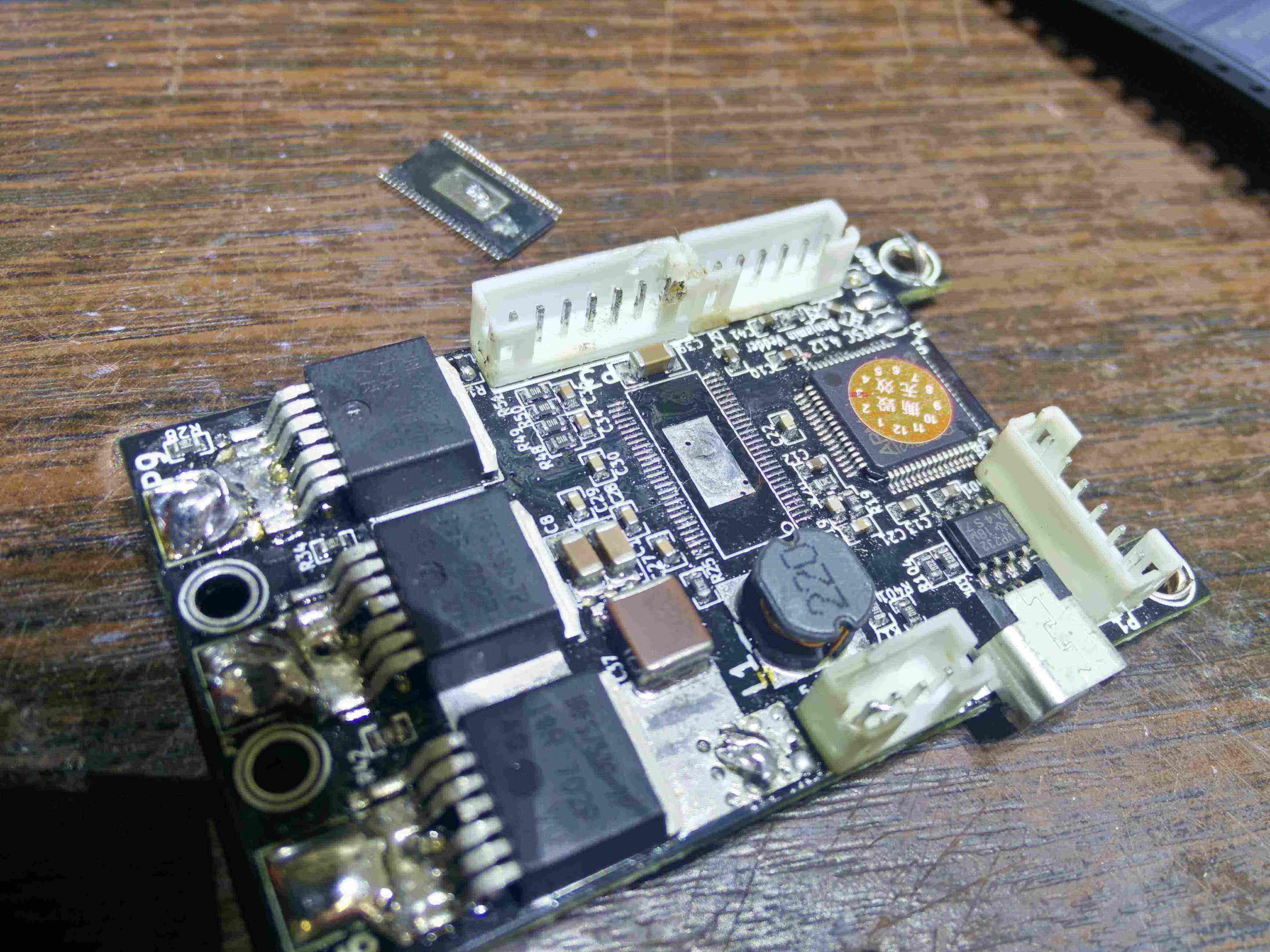
Here’s a Maytech VESC with burn drive chip. I have replaced that to both VESCs successfully. It burnt when i tried using FOC on it. I didn’t even get a chance to go outside to test it!
Anti-spark circuit with a switch.


Time for a new era. Dual FOCBox and noname 90mm wheels with hub motors (550W/wheel, 70KV)

FOCBoxes mounted on an aluminium plate, installed bluetooth, NRF and anti-spark circuit.

A working setup without controller box.

The most recent look, except all bolts are equal length
Those two switches in between boxes are power and lights.
Front light. Hot glue, 10mm LEDs and regulator module.
Backlights. Same thing, but ABS plastic from 3D-pen.

Bright light, bright light!

Controller(incomplete on the picture) NunchukRF board inside an nunchuk.

My own parallel charger. 1A per cell. It is slow compared to series charger. It’s been demolished and i’m waiting for PCBs of my another design. More on that later.


I’m using Ackmaniac’s VESC firmware, and it’s working great! Here’s a throttle/brake curve i have made. It doesn’t flip me off the board while accelerating, yet still enough acceleration, and it also doesn’t flip me off while full brake, yet it still is braking good enough.

Summary
I weigth about 70kg. The board is about 9kg
The board stats when it was with belt, and motor over 2kW and 270KV, wheel 70mm
BLDC controlled, top speed about 36km/h, range around 25-30km
The current stats while it is with dual hub, 550W x2 and 70KV, wheel 90mm
FOC controlled, top speed about 35km/h, range around 25-30km
Although what i have read on the internet, that should not be right, but it is
My usual trips are about 15km a day. I have rode maybe 600km total so far.
So far everything in total has cost around 1100 EUR. That consists from two boards; other with battery, FOCBoxes, hub motors, and other with belt motors and Maytech VESCs. And lots of experimentation  About everything is a noname parts except the FOXBoxes, batteries and remote parts.
If i were to make an off-road board, the additional parts would be around 300 EUR. That is what it would take to ride on winter also
About everything is a noname parts except the FOXBoxes, batteries and remote parts.
If i were to make an off-road board, the additional parts would be around 300 EUR. That is what it would take to ride on winter also