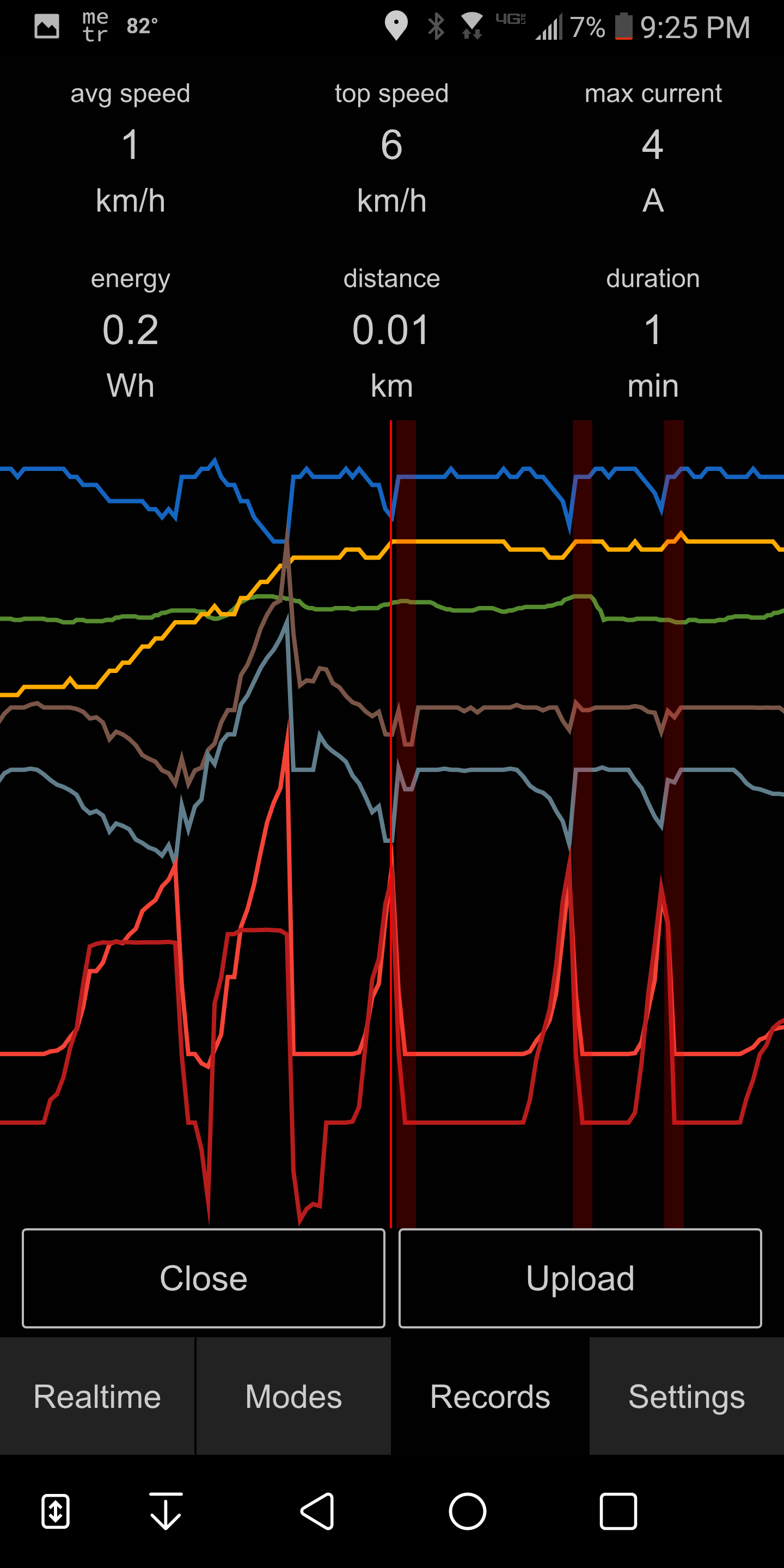
As you can see in the picture when instructing the motor to spin “forward” the motor current locks at around 30-35 A. When the motor is instructed to go in reverse, then the motor amps stay consistent with the amps used and continues to increase until over current issues arise. When this happens, reverse feels EXTREMELY POWERFUL, like as if my skateboard had a rocket attached to it (maybe that’s how my build is supposed to feel?). I have fixed the overcurrent issue, this issue opened up an error in my foc programming that was fixed. I am still using foc if that could have anything to do with it. Running 12s2p with an Ollin Board Co ESC v1.1.
Any idea is appreciated.
My board is a little slow to accelerrate, so I would love to utilize whatever is happening in reverse.
 Clean Graph:
Clean Graph: