Hey Builders,
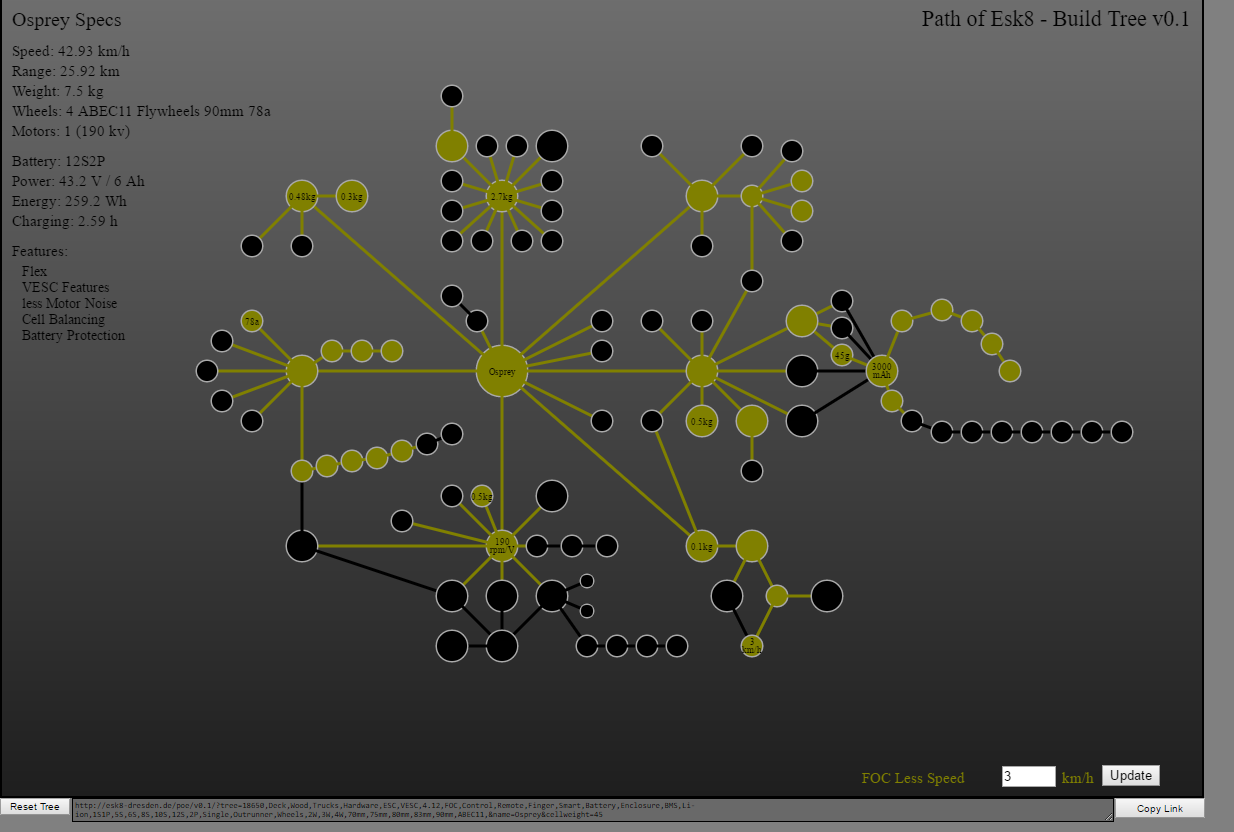
the last few days I was working on something that may help visualize your build, helps with calculations and is easy to use. I came up with this Build-Tree:

BETA Versions http://esk8-dresden.de/poe/v0.2/ http://esk8-dresden.de/poe/v0.1/
What does it?
- it visualization your build (just for the fun of it)
- it shows beginners how eboard-technology works
- you can plan your next build
- it does basic calculations (you need to put in your params or use default values)
- add/remove/exchange parts and see performance/weight change instantly just by clicking bubbles
- range is calculate with 10km/100Wh
- you can share your build with others without explaning every parameter
- it shows a lot of features your board don’t have
- you can check marketing specs of china-boards
What it doesn’t do
- exact calculations (you can’t specify every parameter and some options are not availalbe)
- show costs of your build
- show quality of your build
- features are subjective, don’t take everything too seroiusly

- it doesn’t check if your build makes sense at all (you can specify a lot of bullshit but don’t blame me if your build fails)
- it doesn’t work on smartphones and shitty old browsers
- you can’t read every text, because it too small
- imperial system
- mountainboards
Geared-Hub (Drive-Train only exmaple (Stary-like) http://esk8-dresden.de/poe/v0.1/?tree=Single,Outrunner,Hubs,Gear,Wheels,2W,3W,70mm,75mm,Clones,&durometer=80
Whats next?
- which important features are missing?
- which calculations are totally wrong?
- what are good default-values? (motor-weight, motor-kv, wheel-weight, battery capacity etc.)
- how to improve texts?
- how to improve usability?
- how to imporve graphics? (background-picture, pictures for features, …)
- how to calculculate torque and hill climb ability?
Enjoy, it’s free to use 
p.s. I don’t know if this the correct category for this, admin feel free to move it to general or something


 If we have 100% efficiency, the person can have 48kg, yeah maybe they tested this in china with chinese people…
If we have 100% efficiency, the person can have 48kg, yeah maybe they tested this in china with chinese people…