Hi,
I just finished building my first electric skateboard and I am super pumped. After test riding it a few times, I wanted to make sure that the bldc configuration settings are correct for my board, and check if there is any other things that I need to do in bldc for my long board. Any help would be greatly appreciated. Thanks so much!
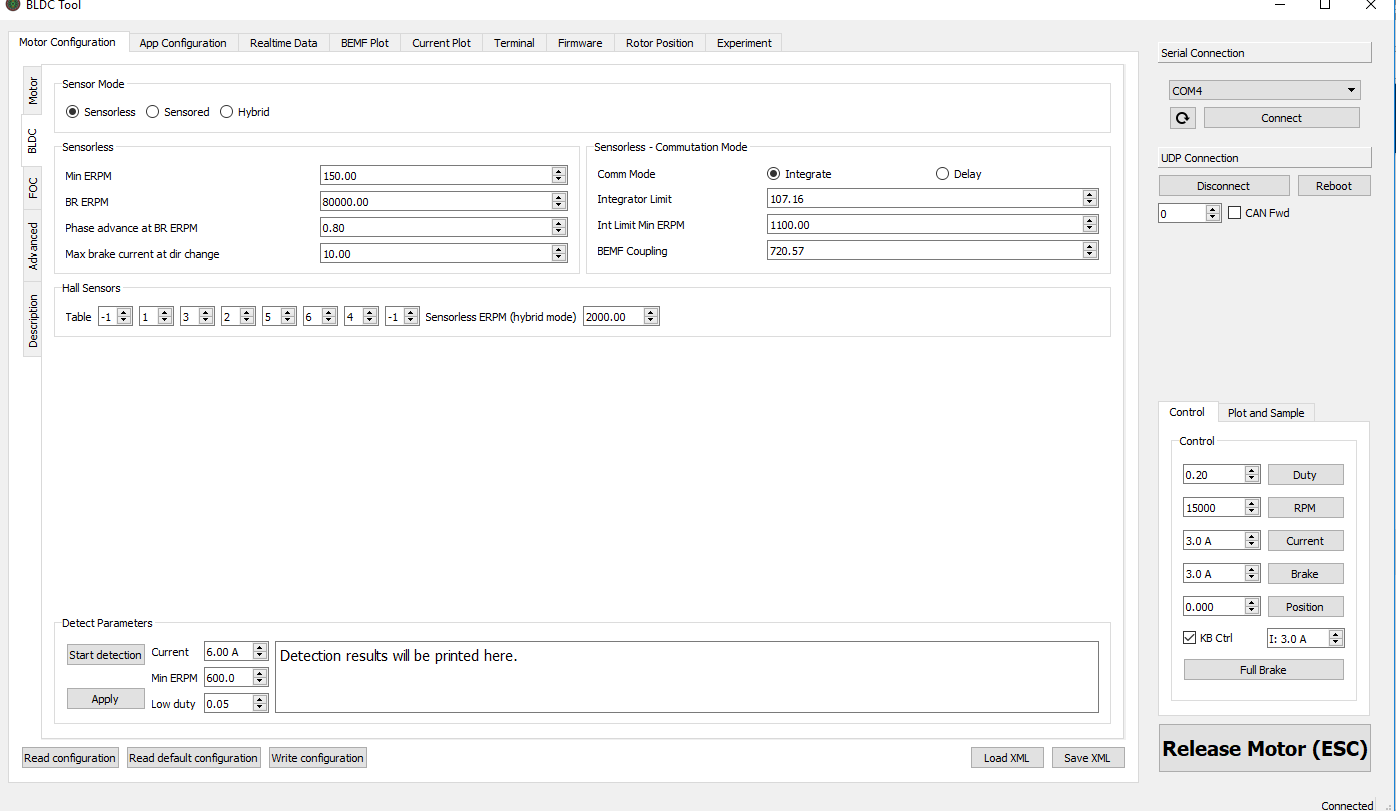
Ok so in BLDC: run motor detection again and click apply then write config.
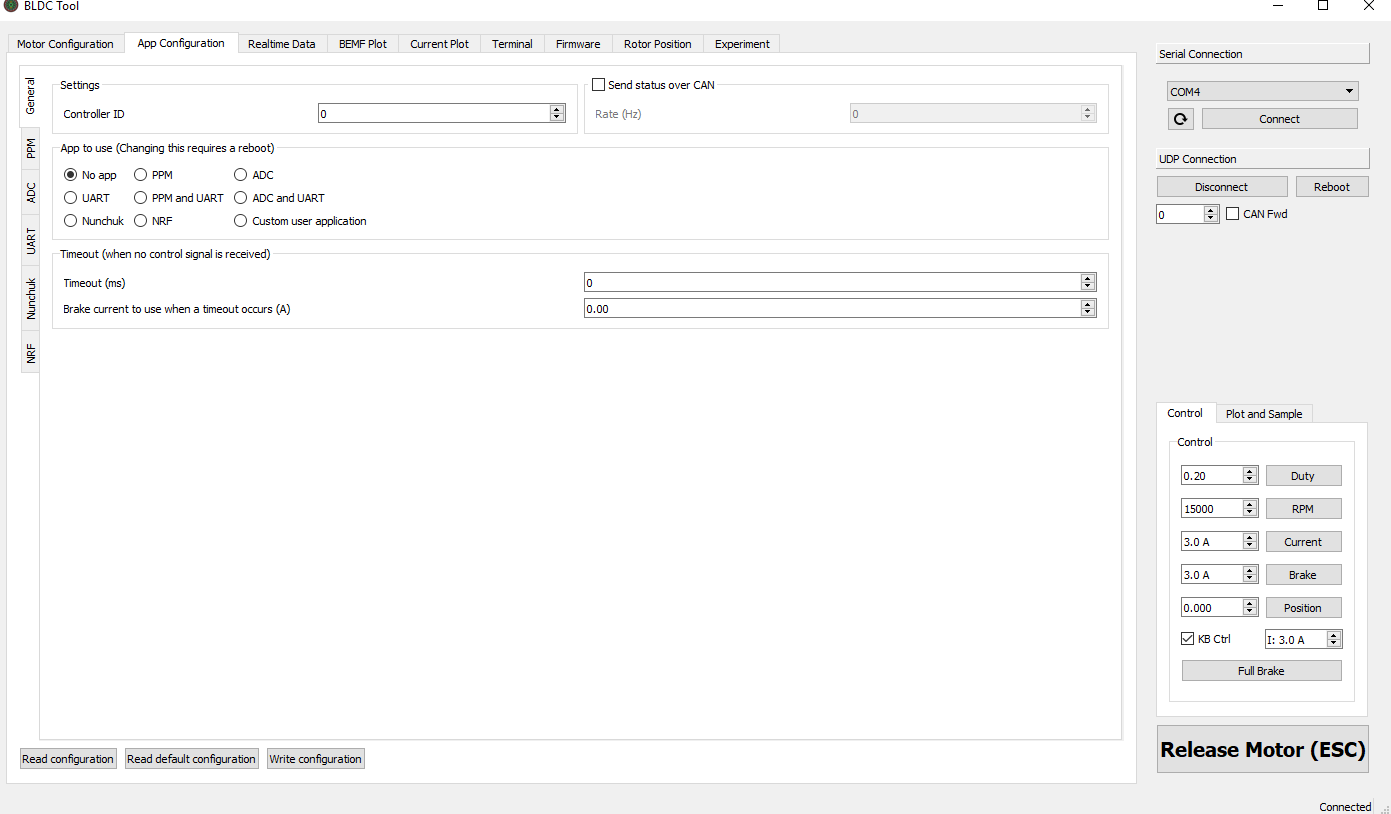
Go to APP CONFIG: click PPM, write config, and then restart the VESC.
Then go to PPM: Click current no reverse with brake, write config. Then check the little box that says display and make sure your remote in on, plugged in, and working. Pull the throttle all the way forward and pit the value that is in the changing box in the “maximum pulswidth” box. Then pull the trigger (all the way brake) and put that value in the “minimum pulswidth” box.