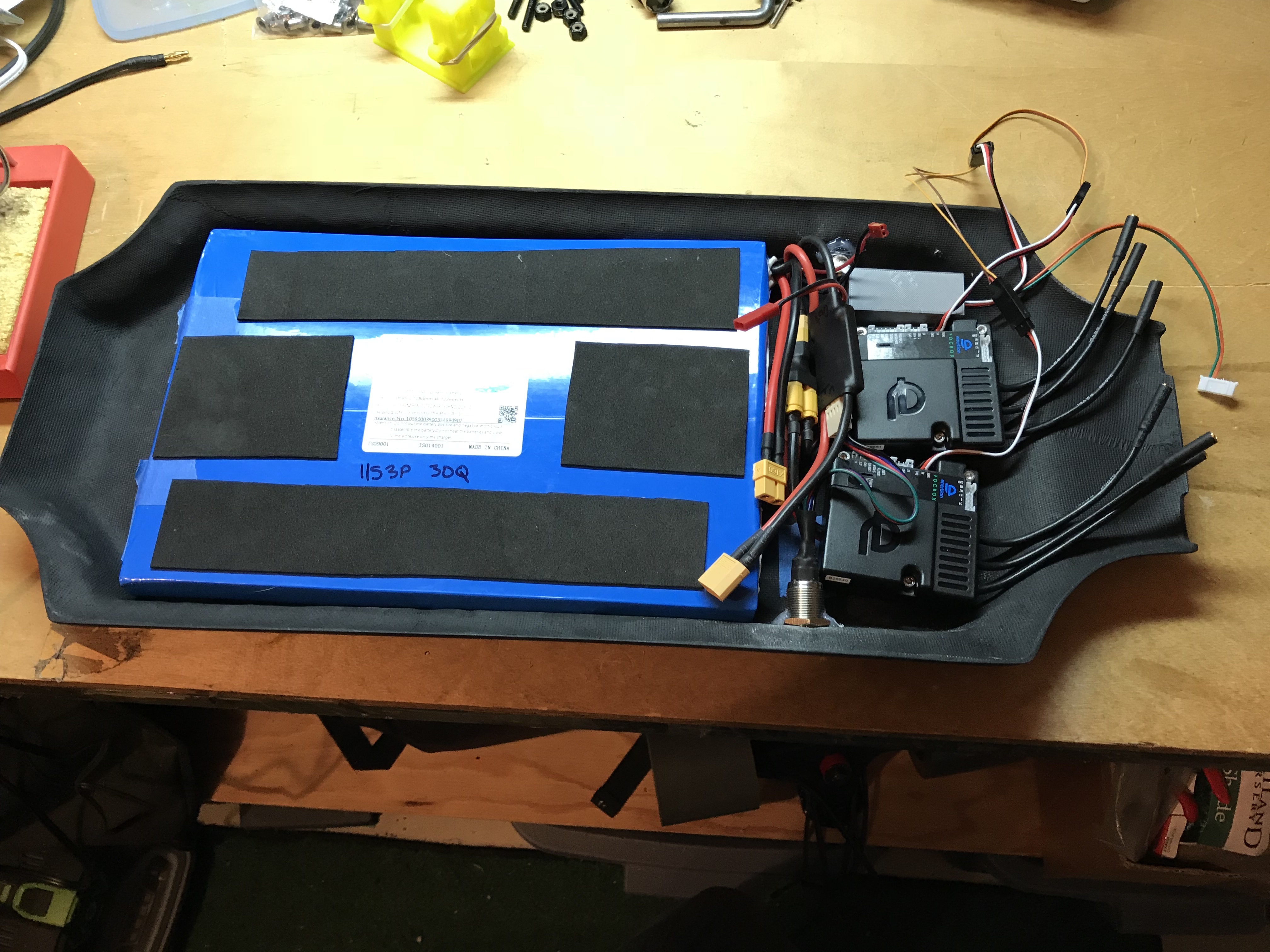
Working on my second build. Had hoped to make something lighter than my first build but have clearly failed. This one is exactly 20lbs, whereas my first was only 16lbs. My original plan was to put a single 6373 motor on this, but while waiting for the Spud deck to ship I grabbed some Hummie’s Hubs and they are contributing to the weight gain. Started by sanding down the deck slightly to make a better fit for the 11S3P battery inside @Eboosted’s enclosure. I also found some really nice “D” weatherstrip that I placed around the edge of the enclosure for a good seal.

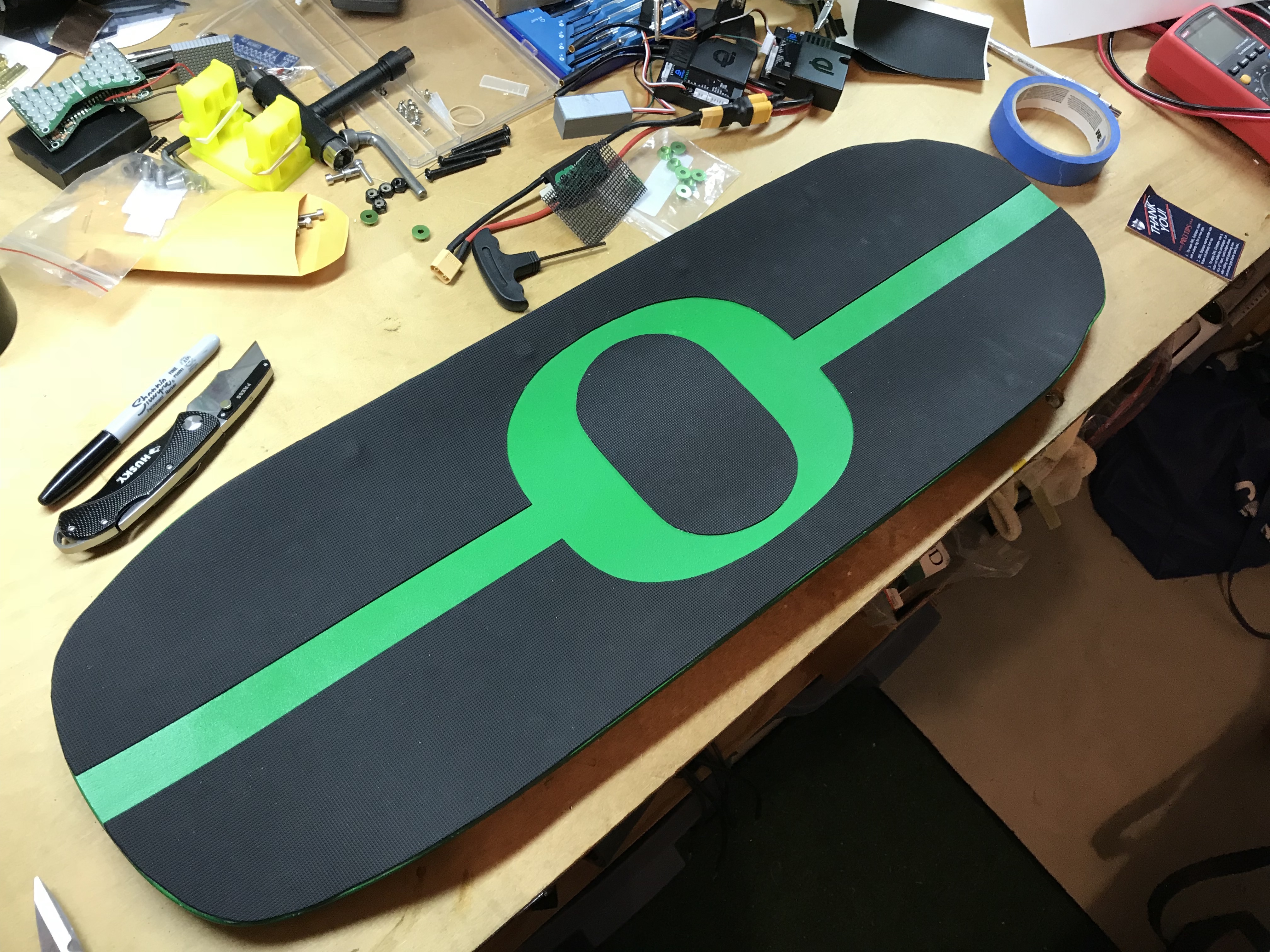
Clamped everything down and drilled the mount holes: Then I sprayed the deck with a fluorescent green spray paint, and sealed it with a clear spray coat I tried to inset the rivet inserts with a dremel bit. It did a decent job, but I would have liked to have set them further down into the wood because they still caused a slight bump under my griptape: For the griptape I decided to try the rubber DKL grip I heard about on this forum. I hated how abrasive traditional tape was. I can ruin a pair of pants carrying the board under my arm. So far I really like the DKL. It was easy to cut. The only downside I’ve found so far is that despite sanding the edges after cutting it it is a fuzz magnet. All sorts of cat hair and fuzz and debris have been sticking to the outer rim of the deck. The DKL grip was only 9" wide, and the Spud is just slightly wider than that, so I devised a split design incorporating the logo from the University of Oregon: I got everything laid out inside the enclosure: I didn’t need the clearance provided by the 1/2" RipTide tunnel risers, but I loved how they helped organize the 6 phase wires so I’ve left them on for now: I wired up a rechargeable LED light that acts as the 1/2" riser for the front trucks. I’ve posted the 3D files for this design here. While I was waiting on parts I also put together a Firefly remote with a parts kit from @SeeTheBridges. I reprinted the outer case/knobs for a green and yellow look:











Also put the receiver inside a small custom fit box I designed:

Underneath I put some green washers on each M3x20mm bolt:

Here’s what it looks like all put together:

I’m having issues with the Hummie Hubs now. Not a very smooth ride at all so far. When the board is off, one side of the hubs rotates freely by hand without much resistance, while the other side really “clunks” from magnet to magnet. Not sure why they are so different. I couldn’t get them to detect in BLDC so I’m running them in FOC right now. Start up is really jittery. Have to push kick before I can get them to move. On my old board (belt driven single 6373 on 10s3p) I could easily start from a standstill. This one feels like a step back. No low end torque. I don’t know if I have a defective hub or this is just what you get when there aren’t sensors on the motors. If anyone has advice I’d love to hear it. I think I’ll message Hummie soon, too.