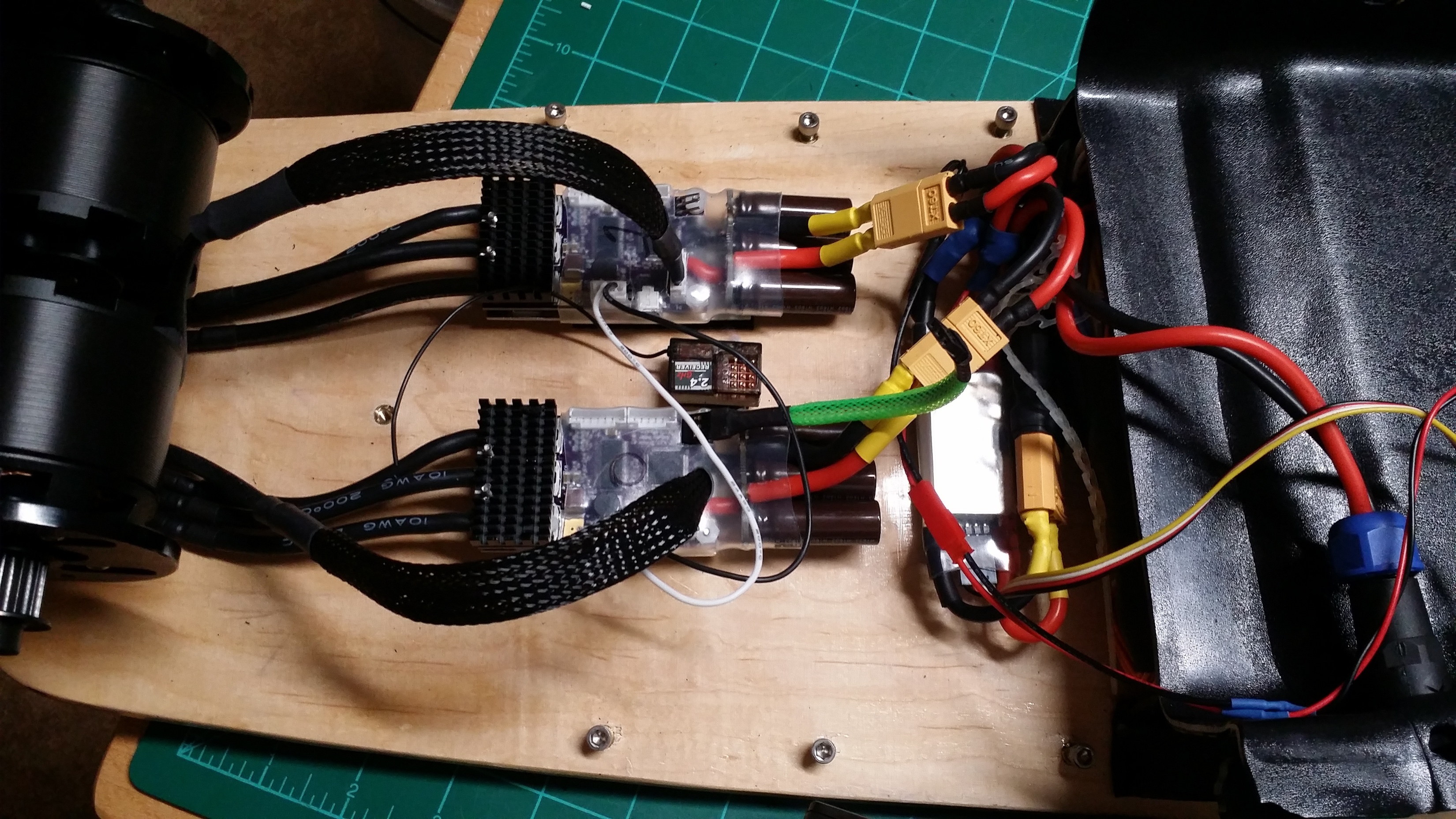
Bought and slightly changed @jwoodsentertainment 's deck and components he had for sale.
Changed to 8s because this is my first elec build. Used Balance Board from SuPower, bypassing current limit for charging.
SOLVED Can’t get Mini Remote i purchased from @JLabs to bind. (surely something stupid, but kicking myself here) SOLVED
SOLVED Added Battery Capacity meter (currently not working (I may have it wired in wrong)) {Nope, well technically yes, but the leads that came with the monitor were in backwards.}
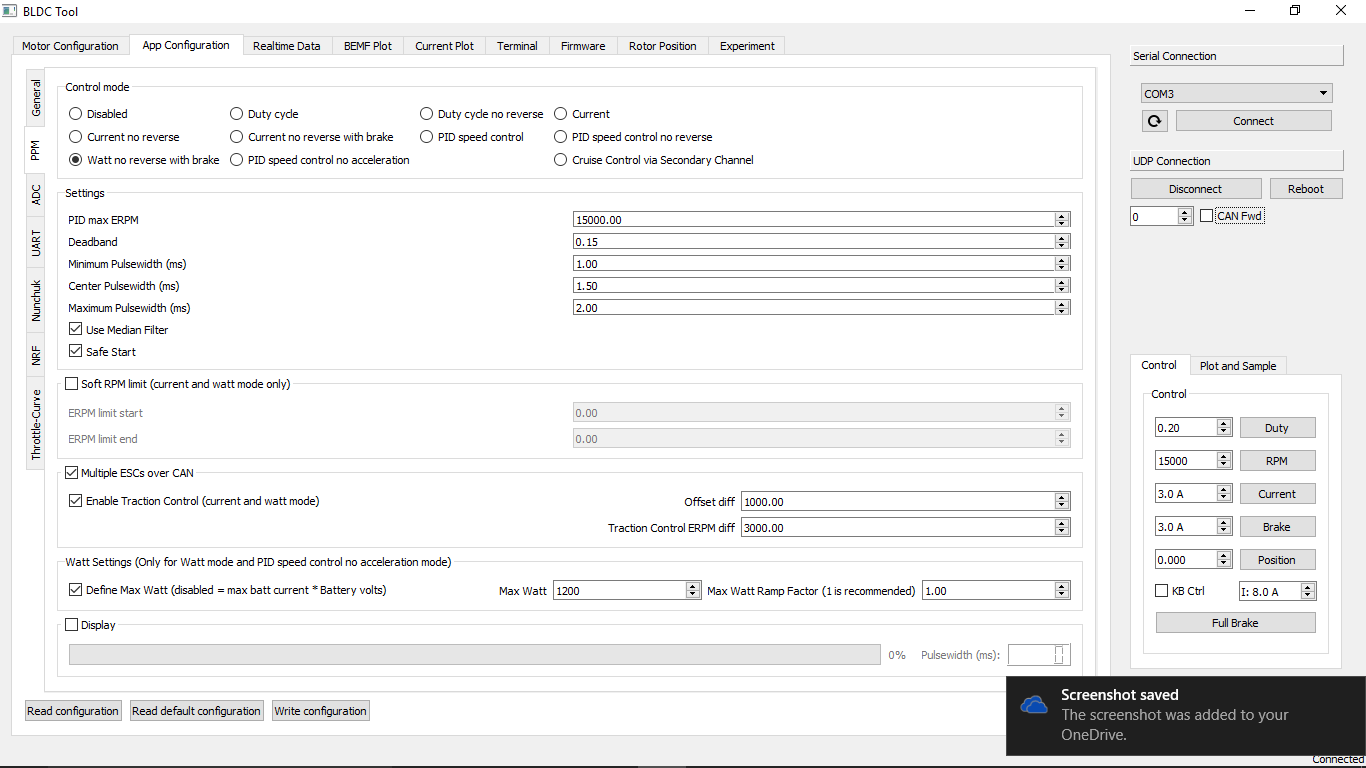
I’ve gotten most of the hardware installed and enclosure made. Electronics wired. I’m wanting to do @Ackmaniac 's watt control mode version of the VESC firmware and this is where I’m hitting information overload. I have watched the VESC firmware tutorials until I can’t see straight.
I have updated the firmware. no problem there.
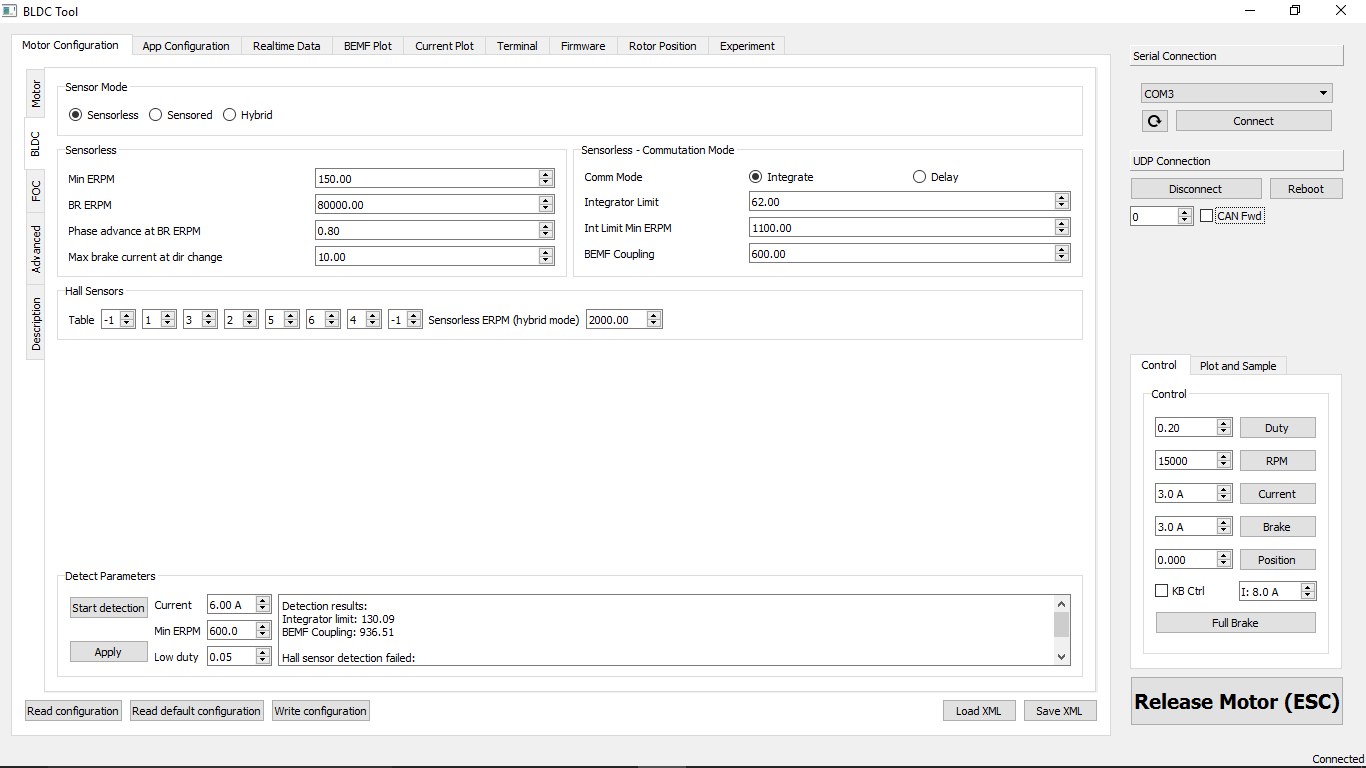
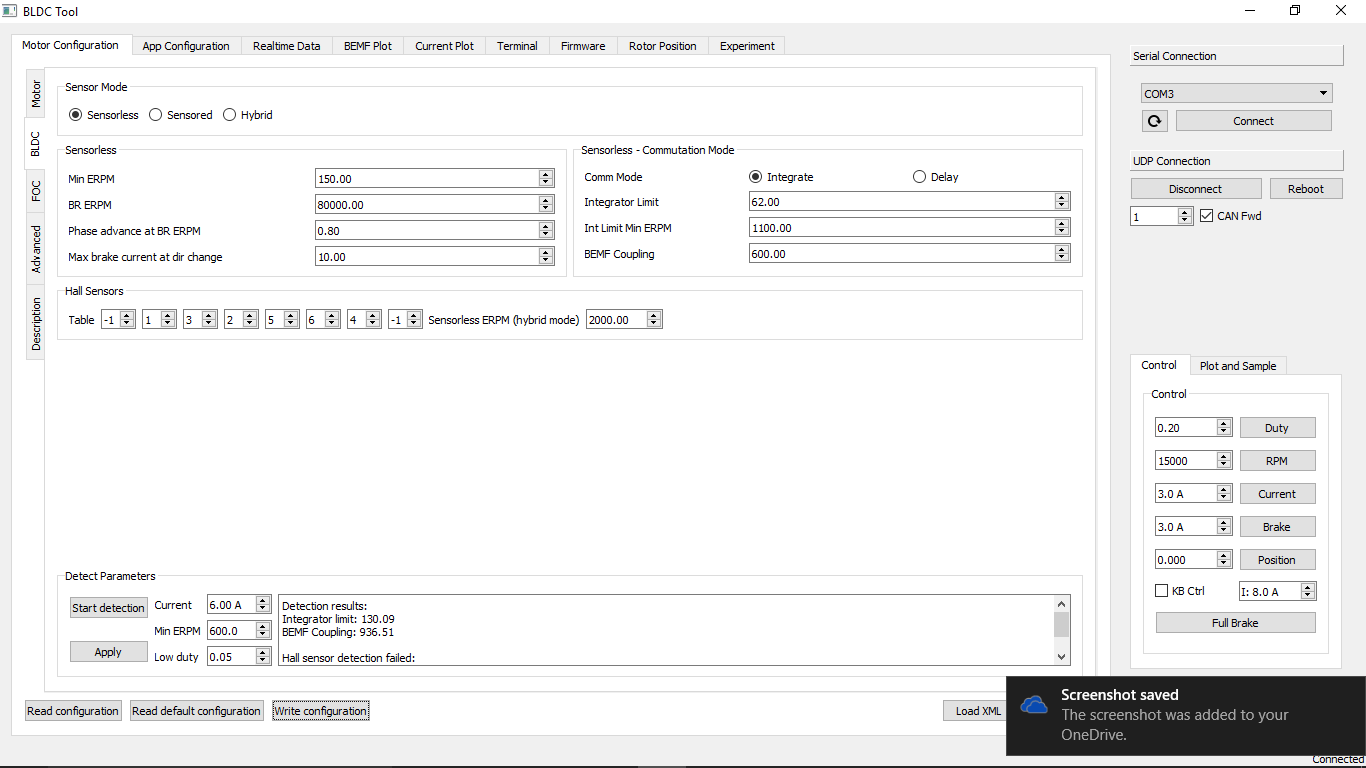
Motors detected and seem to be fine, but when detecting hall sensors is says failed. I rewired the sensor wires in order (as far as I know they are correctly connected to VESC, but I would like a confirmation).
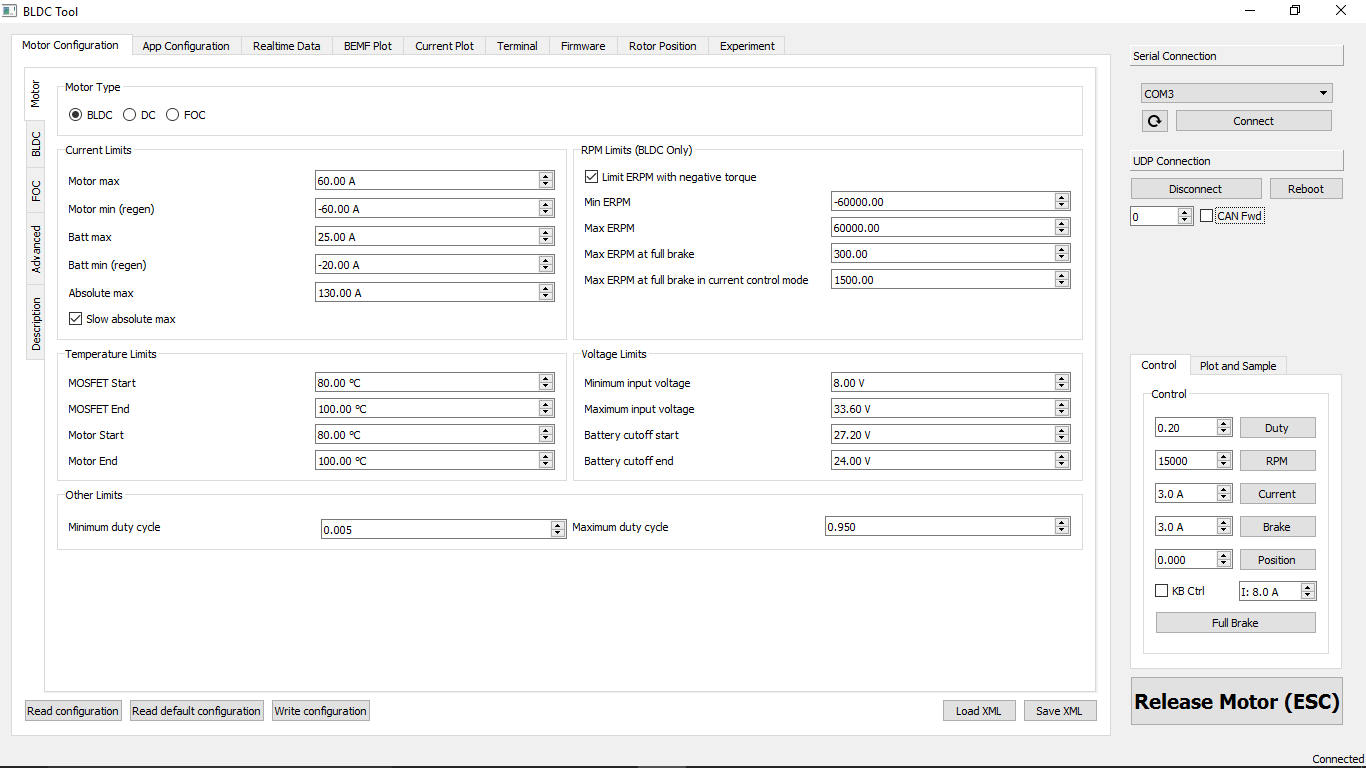
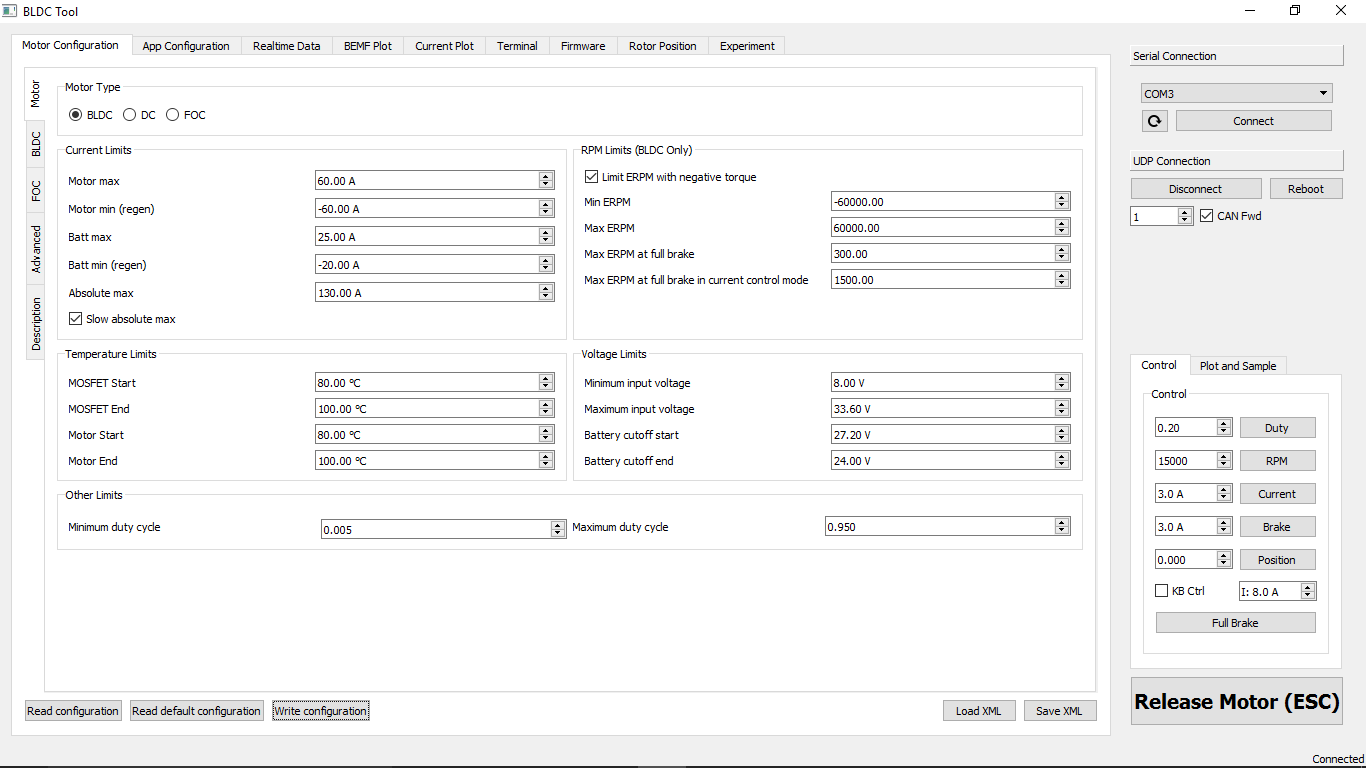
Too many numbers to for setting limits. I’m just confused here. I follow ESK8 supports video, but get confused every time he mentions hub motors and dont change this or that, I would really appreciate some simple settings for Dual 6354 (from @JLabs Group buy) and Dual Vesc Settings with 8s 20c lipos.
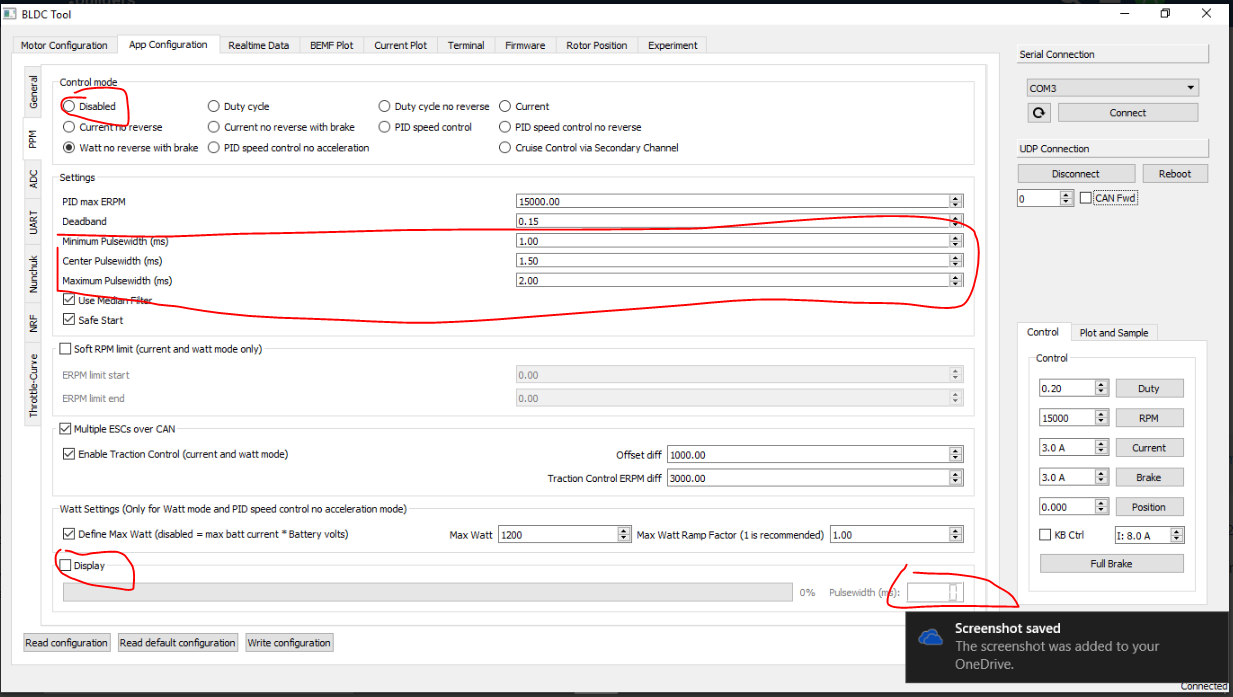
Uploading a few pics of build now and could upload VESC setting screenshots, but they are DEEFAULT @Ackmaniac 2.52 settings right now EXCEPT for controller ID set to 0(the one with the ppm receiver attached) and 1(the other one).
I do have a BTLE 4.0 nano board I would like to hook up, but can’t remember where I saw the thread and the information to hook it up correctly.
Thanks for anyone that helps, I will greatly appreciate any insights I can get.