Hi, I am very new to making e-boards, but have worked in making RC planes and quad copters. The issue that I ran across when trying to make my e-board is that my VESC seems to not be outputting nearly enough current to the motors.
sorry for the potato quality vids…
When having the board upside down and no load on the wheels the VESC is able to get the wheel spinning. When doing this the current draw is around 1-2 amps. When the board is upside down like this and the wheel is spinning at full throttle, I am able to grab the wheel and stop it with my bare hand.
Video of what I mean:
https://drive.google.com/file/d/0B8E6-v_xdAngN1A1OGpQVlJ1Nk0/view?usp=sharing
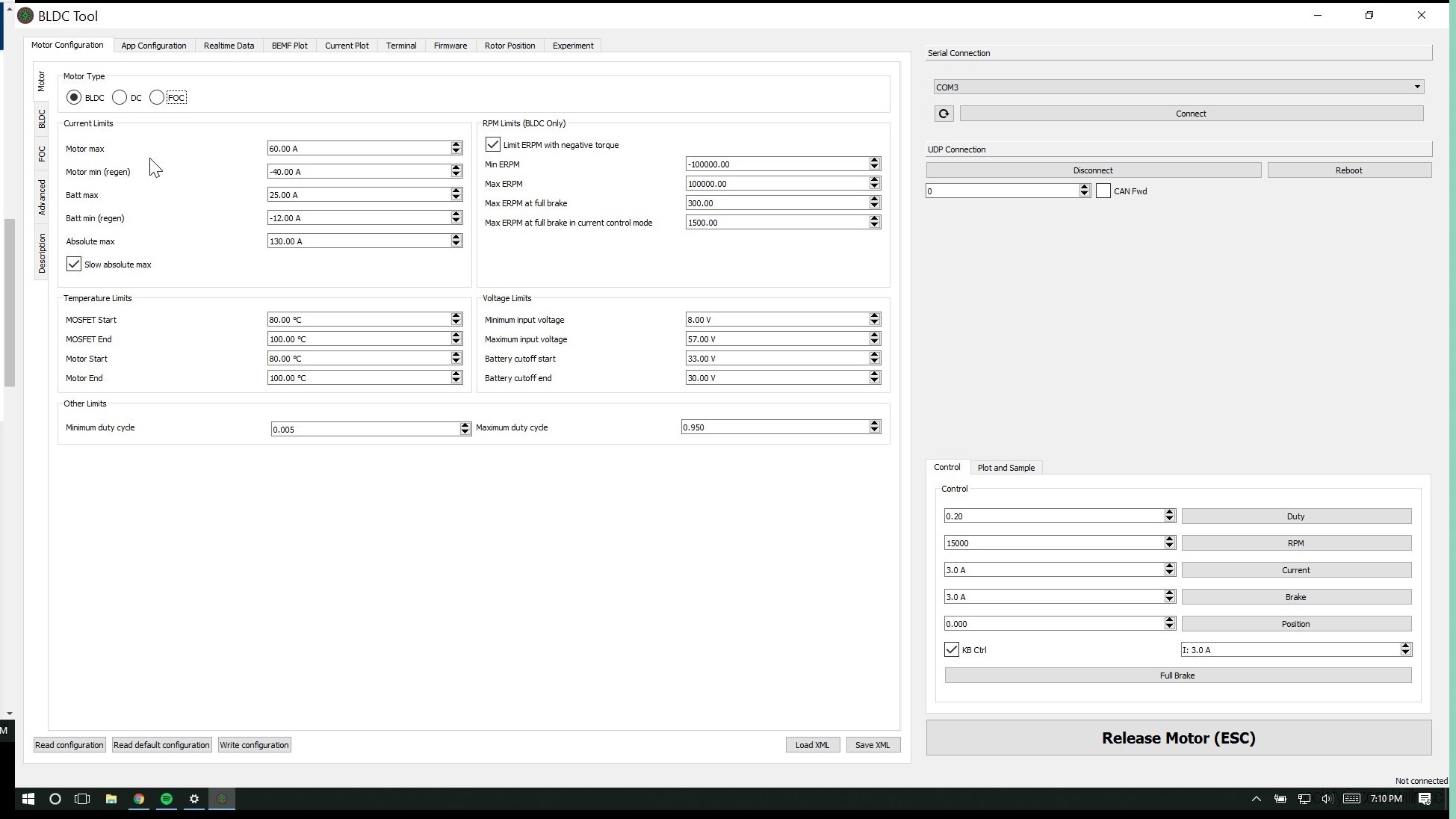
Also, if you’re not running multiple VESCs, unchecked “multiple escs over can” and “send status over can”. These settings should never both be checked on the same VESC.
I ran the motor detection, but it failed. I then ran it again looking at the real time data with active sampling on and got no error codes… So I do not know what exactly is going on with that. I am not running a dual motor set up, so I think that I need to have both “multiple ESC’s over CAN” and “Send status over CAN” unchecked… Correct?
I read somewhere that the motor detection should be done with a lab power supply and not just the batteries. When I tried it, I was just using the batteries, do you know if that is what is causing it to fail or what.
batteries is fine if you know the batteries are good. Yes have both options unchecked. You need to be able to do motor detection, so don’t use the board until that gets sorted out. Does the motor spin at all during detection?