I have been doing a bunch of reading on this topic as it has been plaguing me on my setups and I’ve been trying to figure out what is going on. I just wanted to post this so we can have a clear and concise answer on why it is happening, what setups it affects, and is there a solution.
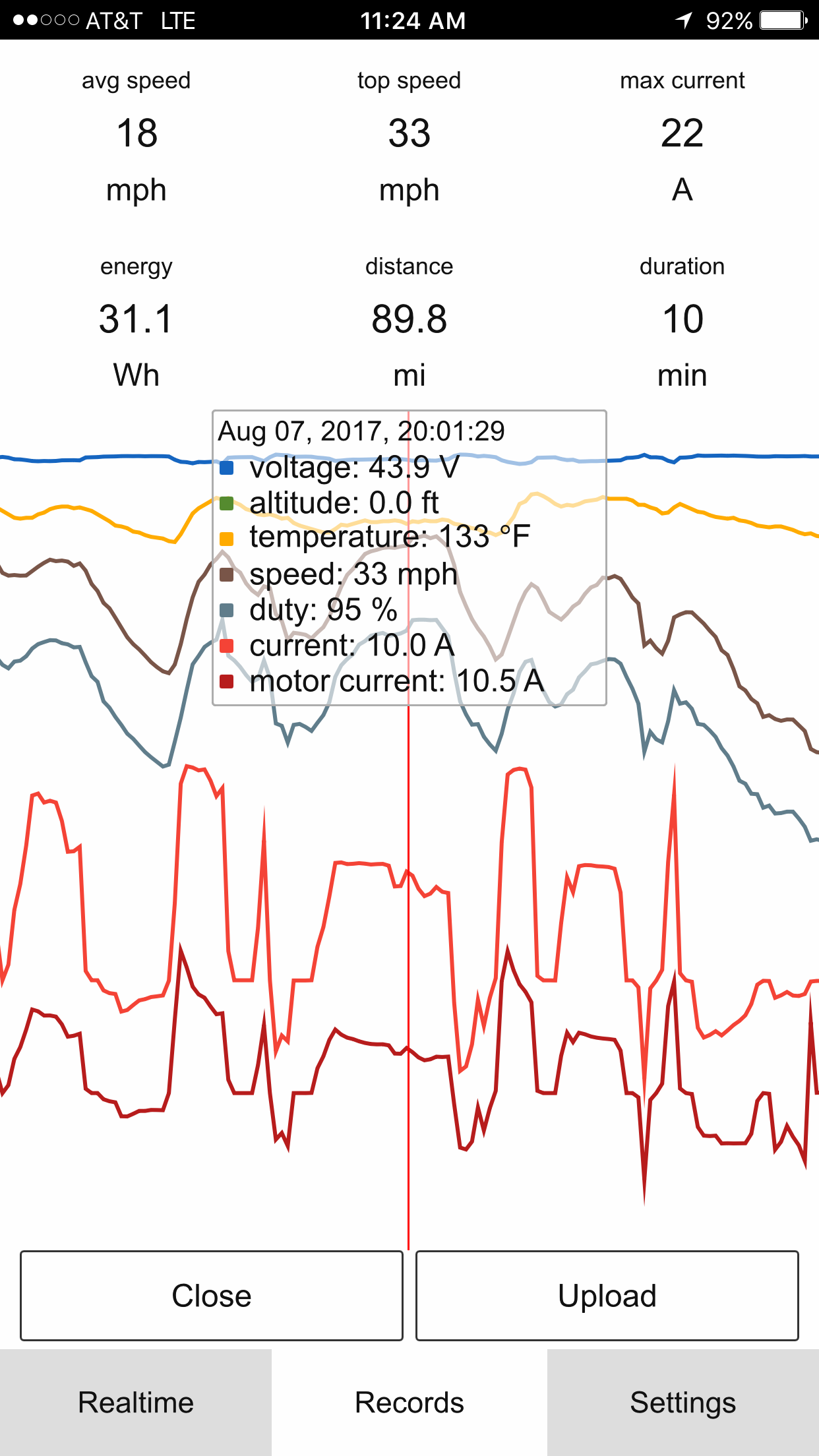
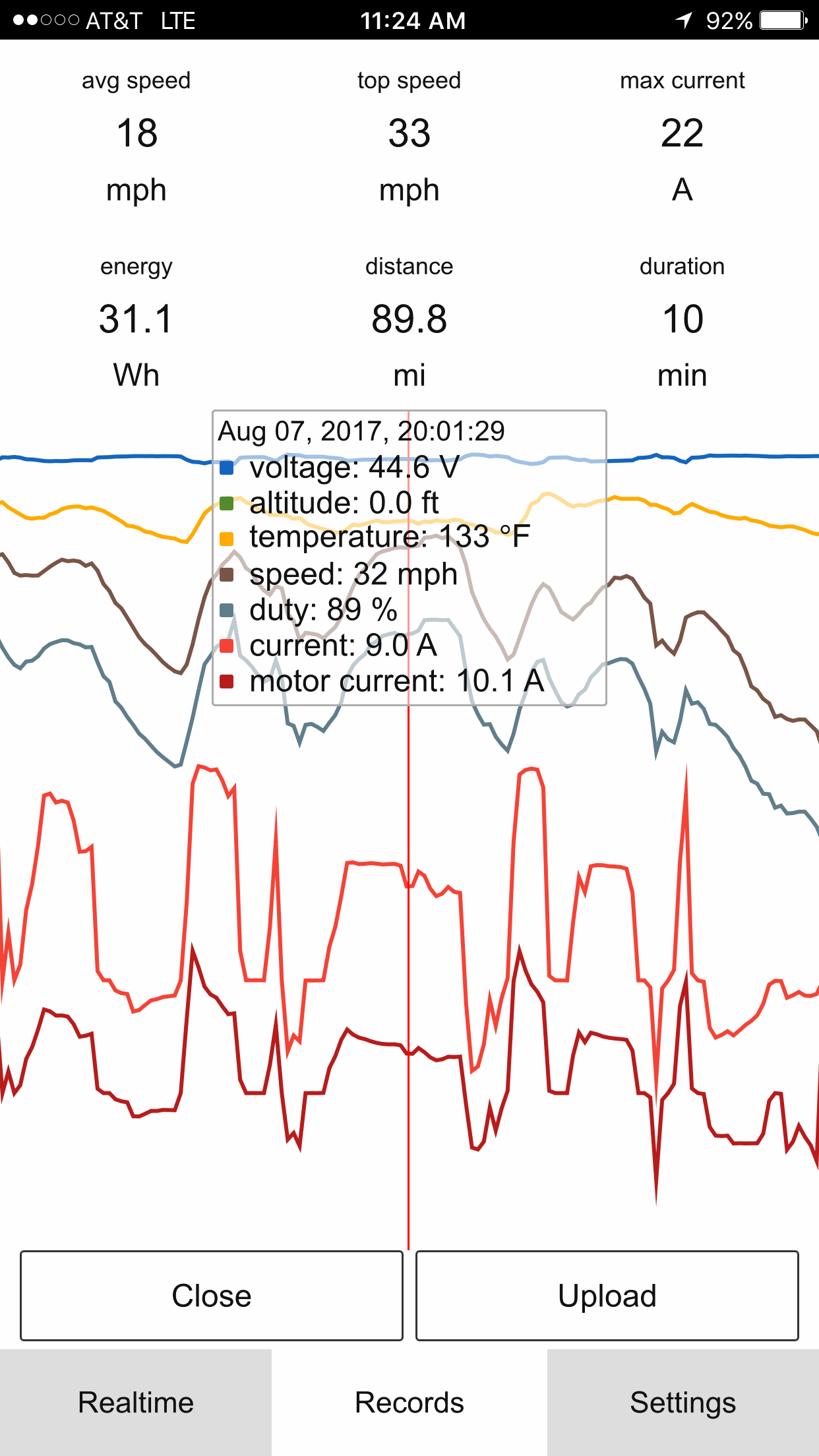
Why is it happening? This speed boost you feel is due to noise on the current sensor which creates bad readings inducing a “boost” that can often be really startling if you aren’t expecting it.
What setups? This I’m not sure on. At one time I thought FOC was the only mode that didn’t do it but that doesn’t make sense because it is simply a basic hardware issue. So I’m thinking it will affect all setups. Can someone confirm or deny this?
Is there a solution? Form what I’ve gathered you can limit your duty cycle to .85 or so which will completely get rid of the solution, but will I think reduce your top speed as well. The other option is I believe to buy vesc 6, which I believe is the only vesc out there that doesn’t have the issue with the current sensors.
You gurus jump in here and please add on to this so we can have a better understanding.
Ah, I’m running his too and it hasn’t been a problem for me. There is a very small amount of kick when I hit max efficiency but nothing that you will notice unless your trying to feel it. Maybe it isn’t such a problem on higher kV motors? I’m using the NTM Propdrive V2 270kV
The current default control loop is 2000hz I believe. Do you think we can lower the control loop time so that we can increase the sample rate? This in theory should smooth everything out and reduce the noise on the current sensor and hopefully get rid of the high duty cycle boost everyone is experiencing.
I found a slightly lower gear ratio, like a bit larger motor pulley really smoothed out the power delivery. Secondly I think if you reduce the current ramp step from default .04 it will smooth out acceleration. And thirdly reducing battery amps can help while keeping motor amps high will make it much more manageable while still giving low speed power.
We’re talking about when the V-TECH kicks in right? I don’t know, i kind of like it. I haven’t noticed it too much on the VESC-Xs I’ve been using though. I’m not calling the FocBoxes because i’ve had them since before that unholy ruckus.
I thought it was caused by the motors reaching their peak efficiency and therefore popping a little burst of power to the ground. I didn’t realize it was literally just a hardware bug. I haven’t had a lot of time to read about this issue, just been living with it for the past three years.
I had it real bad on dual 5065 270kv with 4:1 gearing. Now same setup with 2:1 gearing and 140kv motors its completely gone. Though I now run @Ackmaniac watt mode firmware and lower battery amps. On the original setup I went from 4:1 to 3.2:1 and found the power delivery was much smoother, and also the boost was more manageable.
Maybe it’s my settings or physical board setup but it hits so hard that it seems actually pretty tough to control. Not sure if this kind of jolt you can get used to with time