Goal of this build was to create a long-range, lightweight and stealthy board that still had some punch. @cmatson’s “Phat Matson” build was definitely an inspiration for this .
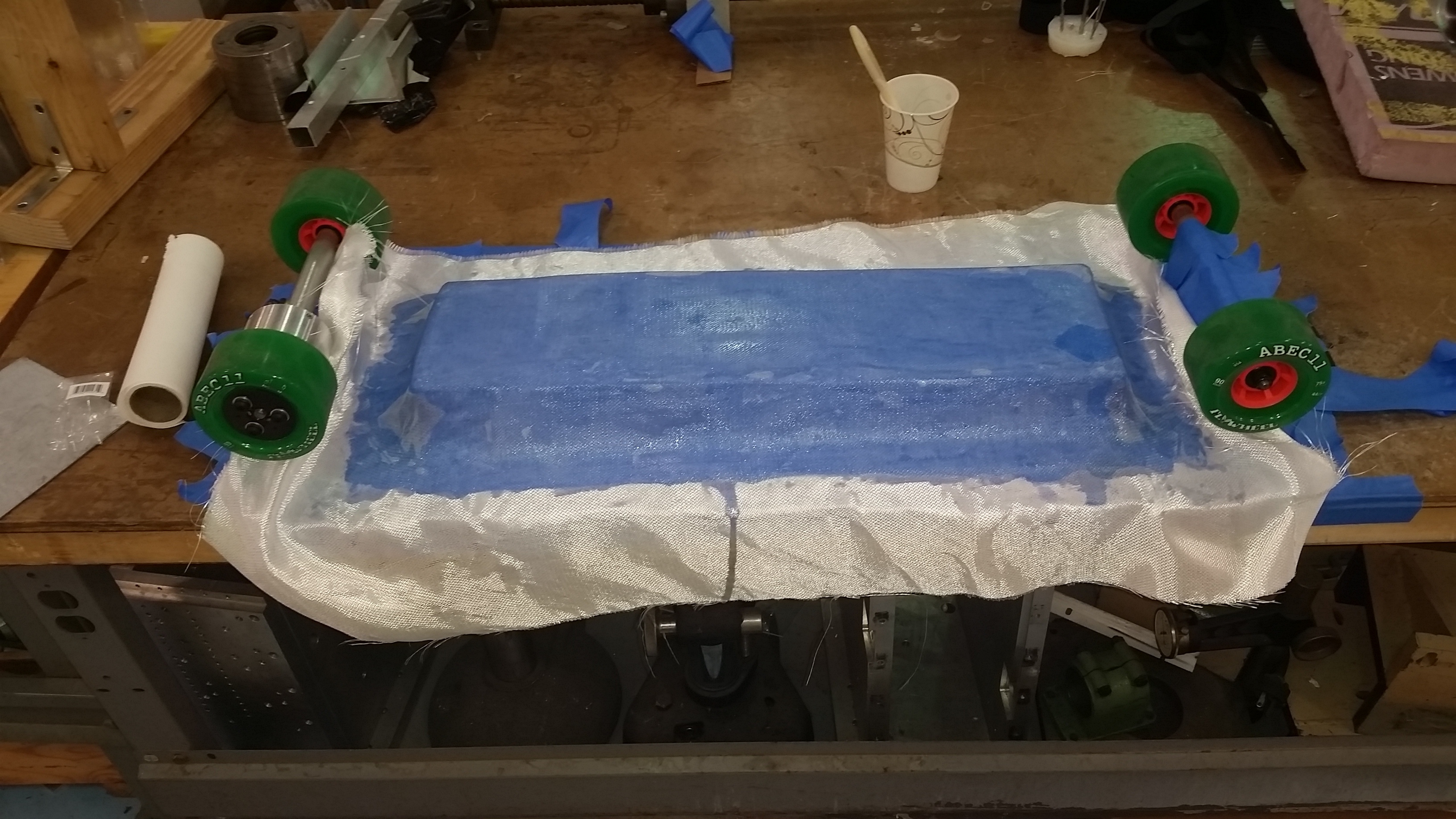
The electronics were too long for @RunPlayBack’s vacuum forming table so decided to give fiberglass a try. First step is to lay out the shape with painters tape. Did two layers to prevent the epoxy from getting on the electronics.
Layed some 3M carbon vinyl to finish off the stealth look. Added some automotive gasket for weatherproofing and bolted it down. I love how resilient the fiberglass is.
First test ride was super smooth. Has enough power to sustain speed up mild hills even though I weigh 220 lbs. Hit 26 mph but don’t have the bushings to keep it stable enough for faster speeds. Felt like it would top out around 30 though.
Nice! Looks a lot like my build with a deck from the same mfg. I wish I knew how to make my own enclosure. Instead, I bought Enertion’s enclosure, but built everything else.
Very cool! I really like the battery you did. When you go with cell level fuses, do you need a spot welder? Or can you solder everything up with standard high quality soldering gear?
I just typed fiberglass cloth into ebay. Was $40 for a 59" wide, 30’ long sheet. For the epoxy I just used some AeroMarine 300/21 Epoxy Resin that I had excess laying around. You don’t really need more than a cup or two for the whole thing. I know @cmatson used WestSystems epoxy, I just found it to be a bit expensive.
Nice build. I am thinking of creating a similar build with a smaller hi5ber board. I haven’t been able to get a straight answer on this from anyone but can you tell me if your carveon hub starts smoothly from a stand still ? I use sensored mounted motors and they start smoothly from a stand still. Do Carveon hub motors start smoothly from a stand still position or do you need to push a little so that the motors engage smoothly ?
In my experience the answer is no, they do not start smoothly from standstill. Someone who is lighter than me might have different results though. I am running mine on BLDC and it requires a very small push to prevent cogging. That said, low speed operation is smooth.
I may be the lightest one here but I typically always push on Carvon’s. In my opinion it feels better for the motor and actually feels safer because you have some momentum to keep you balanced.
This wouldn’t be a problem if i didn’t live in New York. Here in the mornings or during rush hour there is so much stop and start navigating through people, cars, buses (they honestly don’t care if you live or die), bikes, etc. It just makes things a little easier being able to smoothly accelerate from a stand still. I hope someone comes out with a decent sensored hub motor, that is something that is completely missing in the marketplace. Hopefully 2017 will be the year of the esk8 hub motor and we’ll see more options. Thanks for the replies i appreciate it.
Got it. Thanks appreciate it. Your enclosure, did you put down a layer of resin before putting the first cloth down or did you put the cloth on the tape and then proceed to lay the resin down ? Also, did you use cloth or mat ? And only 3 layers ? Sorry just curious about that process.
Three layers seems sufficient. The enclosure isn’t structural but has a nice resilient flex to it. My guess is that it will be more durable than the plastic enclosures since it is less likely to chip/crack…we will find out though.
no cogging at all ? Interesting, Jacob told me this was possible with his hubs if configured “correctly” but it became so hard to trust him after the whole disaster that occurred with his hubs. Are you running FOC or BLDC ?
BLDC. Maybe there is a little bit of cogging in the beginning but it is so minimal that i do not mind it. Actually i need some momentum, 0,001 kmh, but when i am rolling there is no cogging!