Hello all! Here is my math for my board, I used the assumption of a 70-30 distribution (rear to front) along with the following assumptions and specs:
- Rider + board weight = 80 kgs
- Drag coefficient = 1.15 ( I assumed frontal area for aerodynamic drag to be a rectangle of my height as length and shoulder length as breadth)
- Frontal area = 190 x 42 x pow(10, -4)
- Rolling Resistance Coefficient = 0.015
- Weight distribution between wheels on same truck is equal.
Following is a FBD of the system (rider + board) {add in drag force F_d and Grade force of 5 degree angle in direction of f_2 and also it is driver* not driven}:
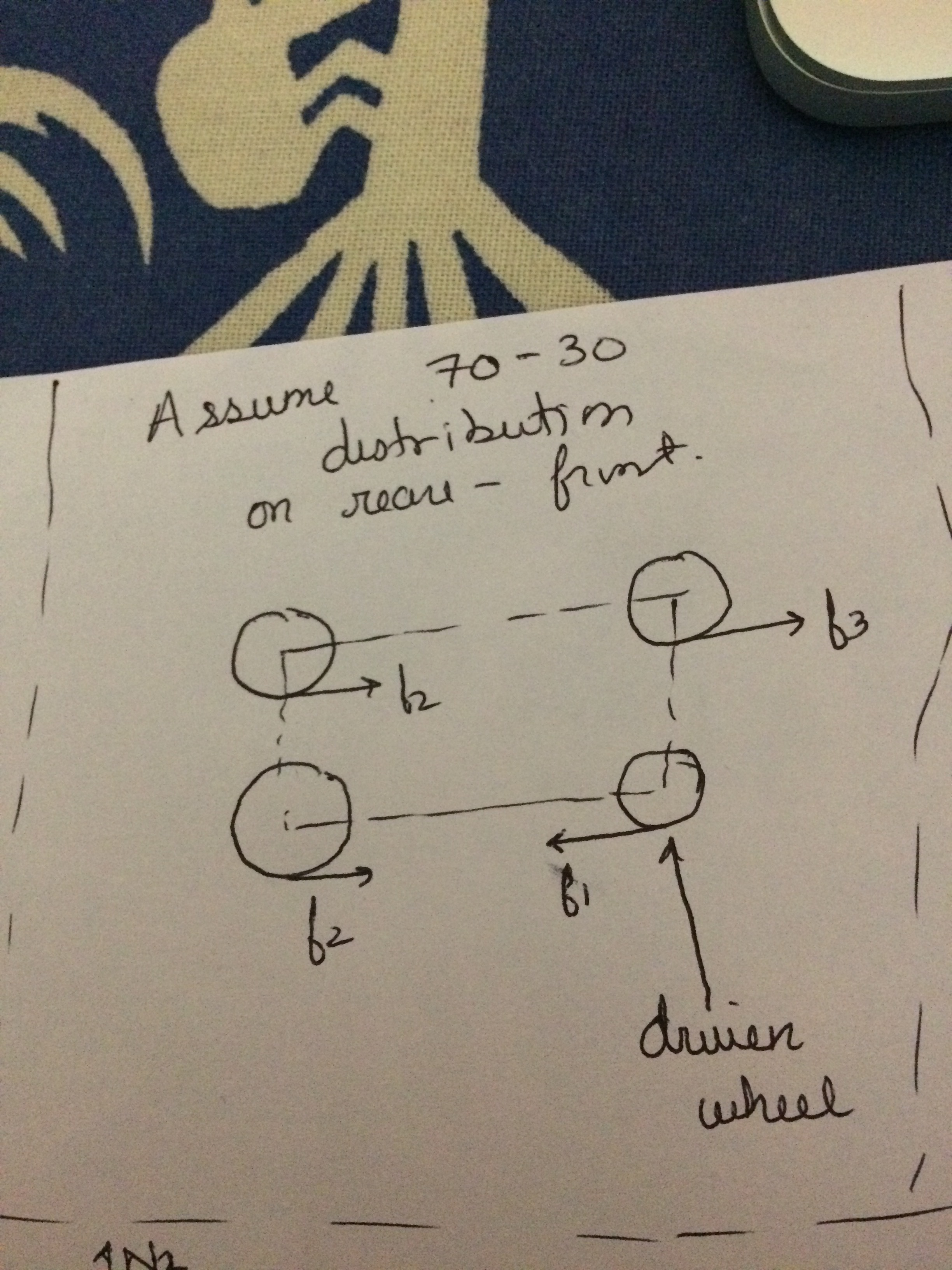
I assumed weight distribution on wheels on same truck is same, hence the frictional forces on front two wheels are the same. Note the directions of friction forces on all wheels except the driver wheel will be same and against direction of motion. This is anyway arbit but the important fact is they will be opposite in direction to the friction force on driver wheel.
In the centre of the below picture, I have drawn the FBD of one of the driven wheels on the front. Here, N’ is just the interaction force between the truck and the wheel. Under the rolling resistance relation, we can find the frictional force acting on this wheel. Same procedure is used to find f_3. Which brings us to the bottom of the picture, which is again the FBD of the rider + board system. Since I want to find power consumption at constant speed, I necessarily need to have resultant acceleration as torque as zero.
Applying the former and referring to the FBD, we find ourselves on the third picture: Thus f_1 is equal 64N and using the latter condition, we can find torque (assuming that the torque due to the displaced normal will be small). With this torque I found the power required at the driver wheel, which turns out to be a whopping 2600W!

Where am I going wrong here? Also, I’ll list my build parts down below, so if you could tell me where I can improve?
Build Parts:
- Turnigy SK3 280Kv
- HK RedBrick 70A ESC
- 6S 5000mAh 20C ( was thinking of using 2 in parallel to get more range)
- 72mm wheels
- 2:1 gear ratio
The max current and voltage of the motor is 60A and 10S.
My goals are:
- 30kmph top speed with a 20-25kmph cruising speed
- 20km of range
I will be using my own PWM control.
Also, my wheel pulley is quite heavy as it is made out of steel. It weighs around 600gms, will that be a problem? Also, will the RedBrick ESC create problems? Other than stuff like, harsh start etc.
