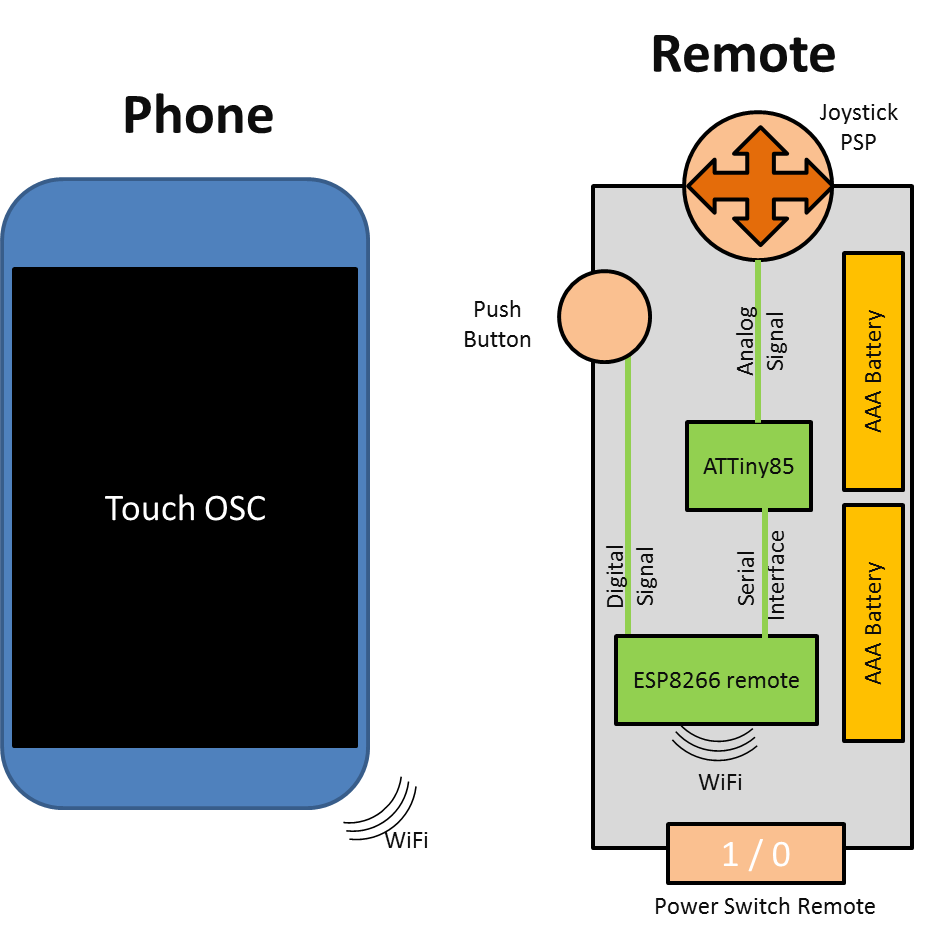
For the remote I just used a psp-joystick like this one: https://www.adafruit.com/product/444
and I used an ATTiny85 microcontroller to read the analog values of each axis. After digitizing the input the ATTiny sends via the serial interface to the esp8266. The esp8266 is connected to the esp8266 on the longboard, which works as accesspoint and sends the data via udp protokoll. So in the remote are two programmed microcontrollers.
Here are the layout and scheme:
Usually the board can’t get out of Wifi range, because the board broadcasts it’s own Wifi. So you moving your accesspoint with the board.
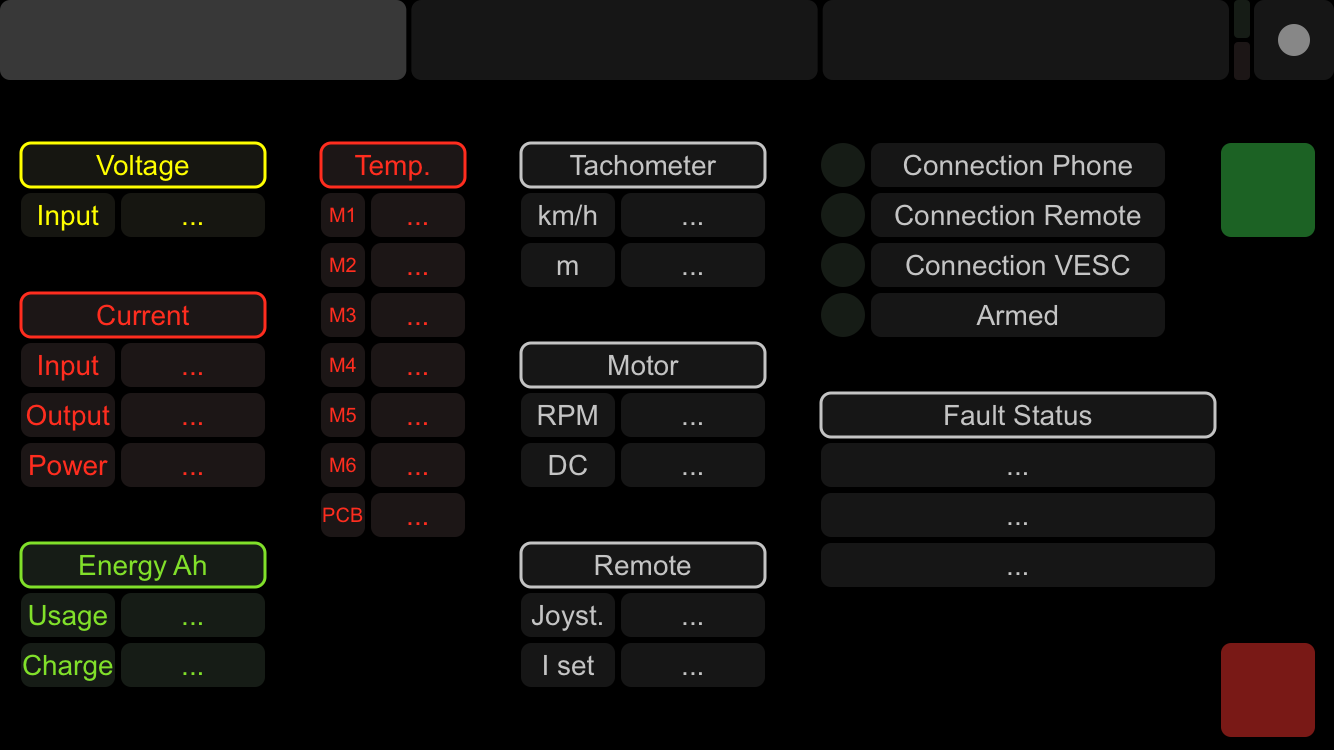
But in case that there is any connection error or timeout of a component (phone, remote, vesc), the board is set to a save state with a braking current of 10A. To get out of the save state there is the button “arm” on the phone
I suggest you instead make it go to zero throttle and let it coast. Otherwise you might find yourself flying off the board if you lose connection at high speed
I also experimented with the ESP8266 and i can’t recommend to use it for throttle inputs.
Disadvantages are also the high current consumption of around 100 mah (at the remote).
I also have the small joystick that you use and i can’t imagine that it is sensitive enough for throttle inputs.
You also don’t necessarily need the ATTiny85 in between. You could detect both axis via one ADC pin. But as i said already the joystick from the PSP that you use isn’t precise enough. Also the resistance for the thumb is very low which would make it hard to find the right position for the right amount of power.
The psp joystick for the remote isn’t perfect but i had some of them lying around and therfore I used them. Concerning the esp8266 and the analog input. I’m using a ESP8266-01 and the ADC Pin isn’t accessable via the pinheader and i won’t use some fiddly soldered wires directly to the chip.
For the better respone-behavior I programmed a PT1-Transfer function for filtering the input signal and as result i get a quite natural feeling throttle behavior. With this PT1 filter the exact position of the thumb isn’t necessary any more.
The power consumption isn’t that important to me, I’ve experienced a battery life of the remote of about 40h.