Disclaimer: The video showing the problem is pretty loud, beware!
So I finally got my hubs today! You can find my build log here.
I started off with removing all the screws, cleaning them & then reinstalling them. The front ones got Loctite 242 & the ones facing inwards got some Locitite 272. Here’s quick video of me applying it - not relevant in any way, I just wanted to try out my new camera.
You would have to remove the bolts from the back side of the motor and remove the rear plate that sits on a bearing.
You should then have access to the stator I’d be careful since it’s a magnet you can easily clip your fingers. Typically, I’d stick a smaller hex tool in the clamp holes and pull it out that way.
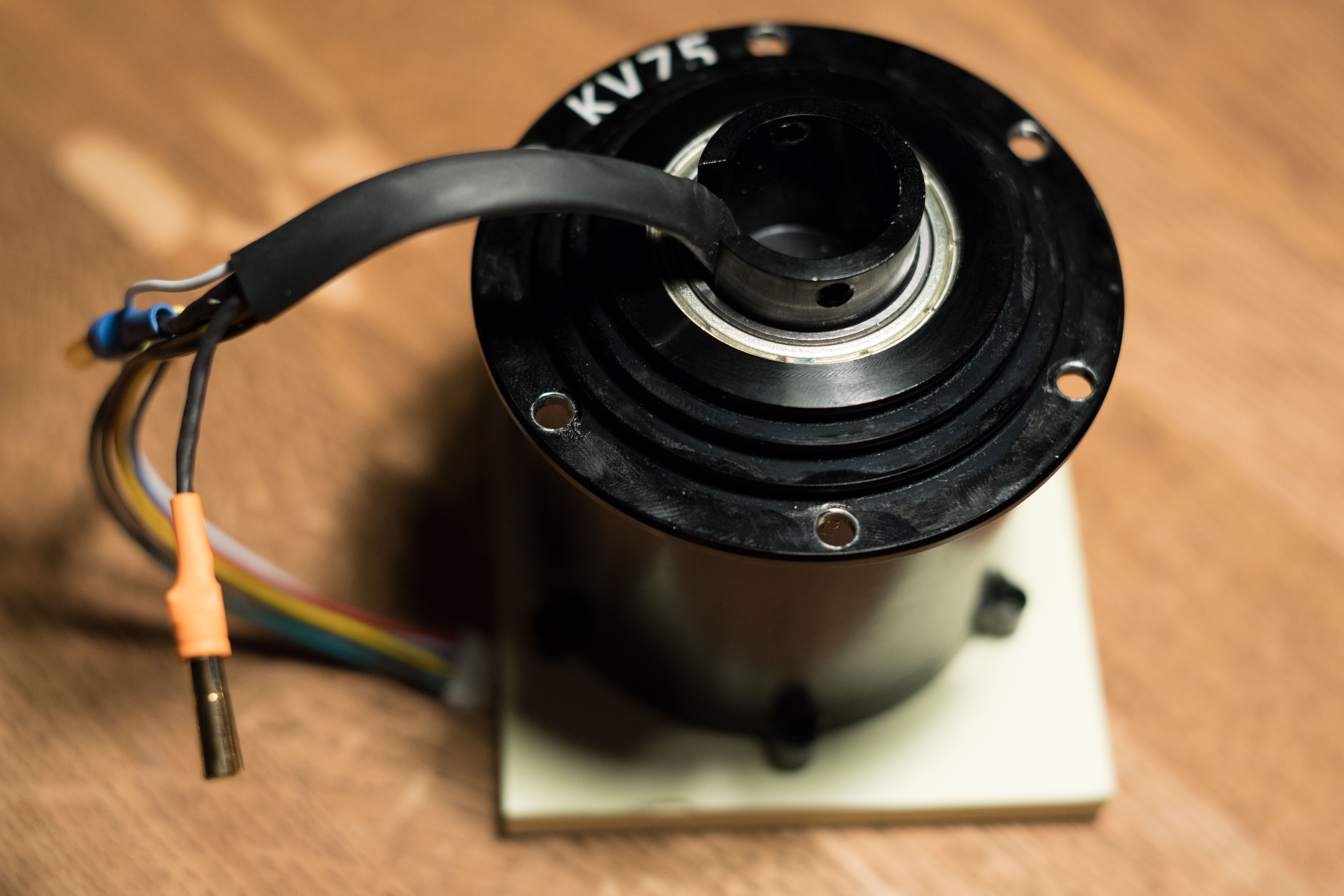
You mean I can just put a hex tool where the grub screw goes and pull it out? Or is the “rear plate” you’re talking about that black(darker than the rest) that’s sitting around the bearing in the last picture?
Take the bearing and rear plate off first. Then hold it by the grub screw with a hex tool and pull out. You’ll get access to the stator and magnets. Careful with the fingers
I got the rear plate off and found what I think was the problem! A small peck of debris.
Didn’t manage to pull it apart any more and figured I’d instead put it together and see if that solved the problem. But now I can’t get it to close properly!
The stator just stick to one side of the magnets and makes it impossible to get it aligned with the backplate.
Sorry just saw this thread now. Glad u figured out what was causing the noise. As far as the reduced resistance while spinning the wheel, thats pretty curious. If two phases are shorted together you’d get increased resistance, but I cant think of anything off the top of mynhead that would reduce it other than you not having the axle nut on that motor torqued to the same spec as the other side.
Do what @BigBoyToys said and touch two of the phase wires together to see if there’s increased resistance. It doesn’t look like anything is wrong from the video. You could always hook it up to an ESC to see how it reacts, just don’t apply too much throttle unless it’s working correctly.
@UniqueSnowflakeN27 It’s not entirely easy but you need something that fits into the shaft and long enough to not clip your fingers and you need to notch it into the bearing when you align it.
Frankly I prefer the free roll and quiet sound of the one you took apart.
Maybe take the other one apart and clean it as well so they both have better free roll.
As long as they push the board when you give it throttle and performance has not diminished then
“Don’t Worry, Be Happy”
But I can’t see how me just cleaning of debris/residues of from the backplate helped. I guess the way I put it back together was perhaps a little better than they do on the assembly line, resulting in less friction/pressure on the bearings?
Still looks the same and fits just as well as the other one.
If I where you, I’d take the motor, plug it to a vesc. Do detection and see what your top erpm is and get the voltage of your battery at that instance. Devide the erpm by 7 (number of pole pairs) and then, by your voltage and you’ll have a kv. Both motors should be the same. The pitch of the noise changes with different kv, so maybe, they aren’t a true match? It’s actually harder with smaller motors like these cause you need between 25-35 turns to get a good kv. Larger motors need less turns.
Also, do an FOC resistance test. That will give some indication usually if theres a short. Both motors should be close. Do it a few times on each as the numbers can bounce around a bit.
So I got both of them hooked up to my old VESC and did a motor detection and then ran them both for a while in BLDC(sensorless).
So far so good, it seems. Their pretty quiet too! I’ll have to do some more testing, but both seem to function! The one running is the one I had some trouble with earlier. If it turns out that the “faulty” one is just as good as the other one, I’m tempted to open up that one as well just to see if I can make it go as smooth as the “faulty” one But I’ll have to do some more testing(like @evoheyax suggested) to make sure it has the same torque/speed later when I’ve got the rest of the board settled.


 But I’ll have to do some more testing(like
But I’ll have to do some more testing(like