So I just finished turning my 6S Lipo board into a 6S2P Lipo board and I was stoked to give it a shot! So I plugged that sucker into the computer, ran a motor detect and hopped on it for a quick test ride. After riding around I decided I wanted more glue on my enclosure… (my enclosure looks a lil something like this…)
And so after painstakingly waiting the 48 hours for the glue to cure I hopped on the board. Stoked for another test ride. BUT IT WAS NOT GOING TO HAPPEN. My board was at full brake without touching the remote and the only way to get the motor to spin at all was at full throttle where the wheel was only going about 2 mph. Something was wrong .
So I ran upstairs and plugged the sucker into the computer, ran a motor detection and thought… well everything seems in order. But when I used the arrow keys just so spin the motor (for shits and giggles) the motor just twitched… So I panicked and checked for faults, zip, zilch, nada .
I went back and ran a motor test again, it worked perfectly.
Tried the arrows, nothing.
Check the lil’ real time plot, nothing happening, no current and just a wee little negative erpm when I hit a button.
So naturally, I get pissed and start pressing all the arrow keys a bunch and the motor is just twitching a lil’ bit, like a paraplegic who just managed to wiggle their big toe, (it’s moving but just barely) Then I hear/see what every esk8 member dread a quiet pop aaaaaand red flashing light. I thought I was hosed. I go to check what the error code is and before I can do it the motor starts spinning on its own.
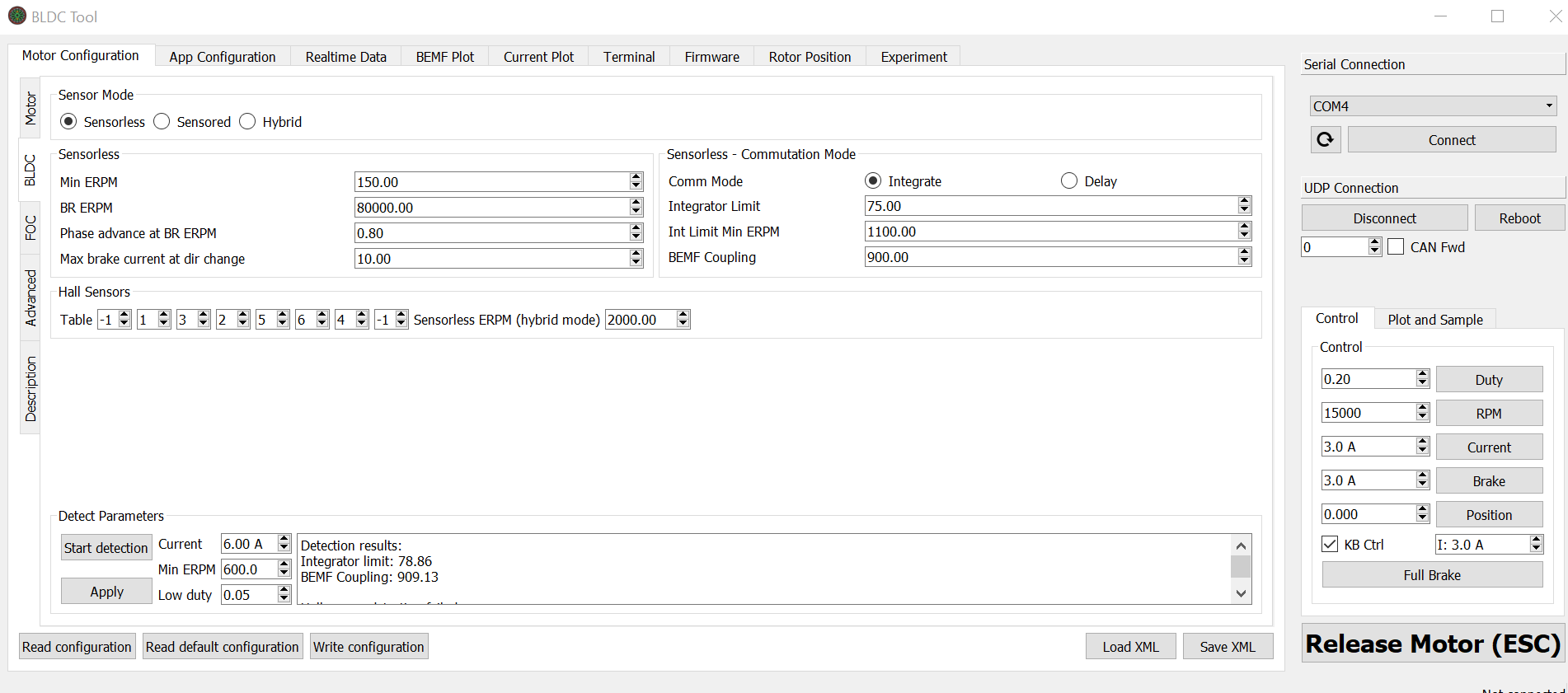
WTF It rocked a little bit backward, then a little bit forward about 5 times. Then it went FULL THROTTLE without me touching anything I mean nothing. The wireless remote was off and both hands were off the keyboard of my computer and this motor is going fast as hell. So I unplug the power and the motor stops. I plug it back in and run a motor detection, no issues. I press the arrows, slight twitch. I then replicated the failure by mashing the arrow for a few seconds and I hear the pop and red light flash. Here is my error code and settings:
I would really love some input here as I am completely lost as to WTF is wrong with my setup: Why does motor detection work fine? Why does the motor work for a few seconds then full brake? Why am I getting an over current fault? Please send halp.