That’s not entirely true. That’s only the electrical characteristics and not the human characteristics. If you have more power it’s a lot easier to waste more energy accelerating faster, which will cripple your range faster than anything else. So the 12S will have a shorter range than the 10S range less 2km
It’s easier to drive 10S more efficiently than 12S, though it’s physically possible to drive more efficiently with 12S, if unlikely. It’s the difference between “possible” and “easy”
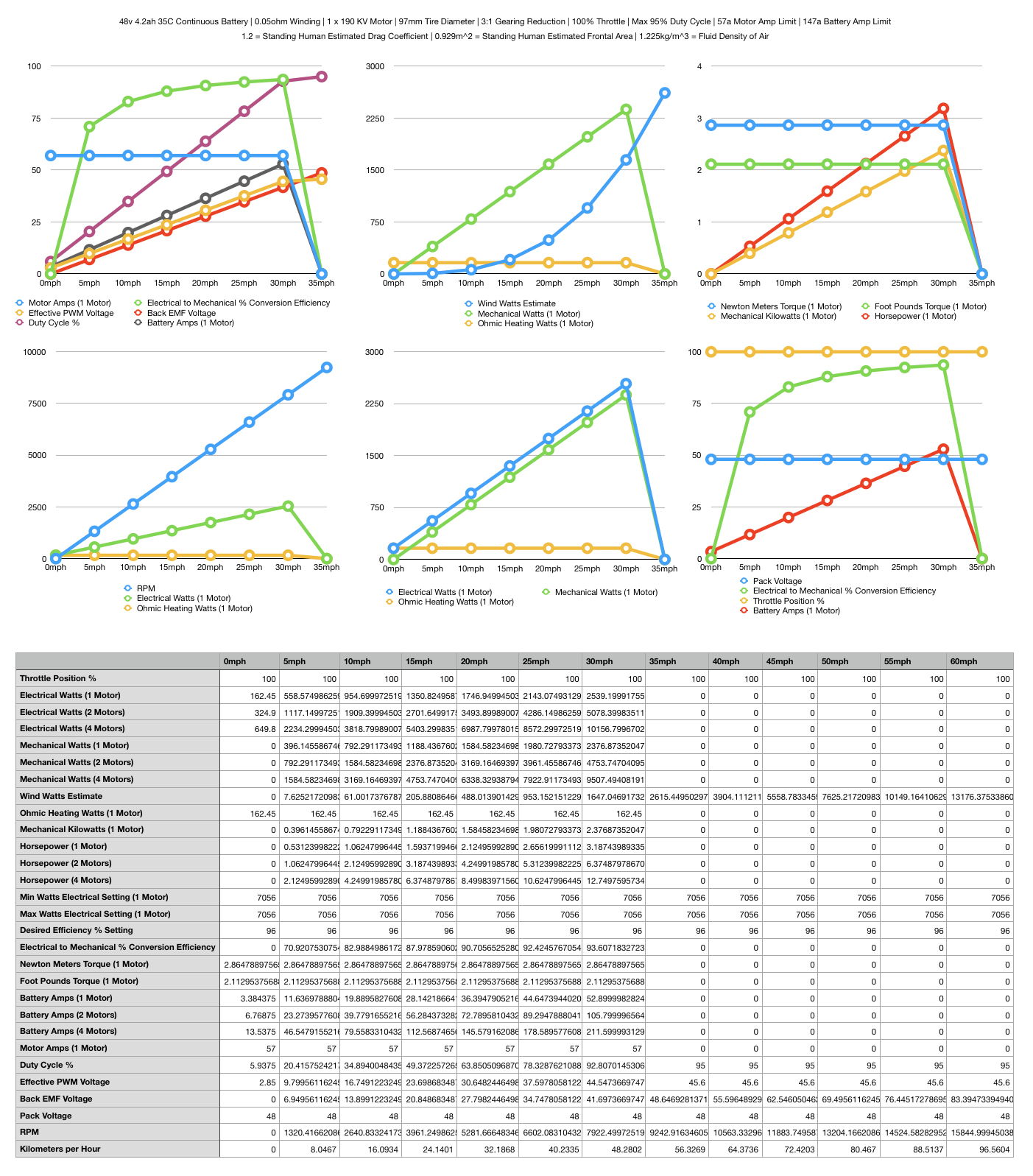
maybe could be more efficient but I think most of the losses are in the motor and if you ride around at 20mph with 10s and have a 20 mile range, and then ride around on 12s doing the same 20mph you’d have slightly less range. you can look at the grin tech motor simulator and make an even comparison.
if you want to go faster 12s makes sense but not if you want to stay the same speed
I think you need to get to the bottom of why your setup doesn’t go as fast as it should.
You have 10s4p, twin 6365 motors. 83mm wheels 15/35 pulleys. You should be getting a lot more than 30kmh.
Either your KV of the motors is way off or you’re losing power somewhere.
yeah it could be, it just doesnt feel as fast. i really need to check the kph. maybe i have the 36T pulley… 10s3P but that doesnt even matter in this case.
same constant speed should mean same constant motor amps and effective voltage from the controller, and same torque and rpm (mechanical power) from the motor, and therefore the same electrical to mechanical conversion efficiency in the motor regardless of whether you choose 10S or 12S. on the battery side the higher amps from the 10S would lead to slightly greater power losses in the battery wires for the same acceleration performance, since losses are proportional to the amps squared times the resistance.
at 12S with the same battery and motor amp limits, the controller could allow more watts to the motor at the same rpm during acceleration (same battery amps at higher voltage is more watts), and faster acceleration lowers efficiency.
you can increase the top speed of a 10S system with a couple extra teeth on the motor pulley and raising the battery & motor current limits, but this will produce more heat in the motor and esc.
for the same electrical to mechanical conversion efficiency at the same speed with the same # of motor amps with higher kv one would need to either decrease tire diameter or increase gear reduction for example by choosing a motor pulley with less teeth.
i suspect the lower efficiency in your simulation with higher voltage is caused by the higher internal resistance of a higher voltage battery pack and not caused by esc or motor losses.
right, to compensate for the lower torque at the motor with higher kv (same motor amps), you have to adjust the gearing such that you end up with the same torque at the wheel for equal performance and efficiency with both kvs.
the higher voltage you run, the more efficient your setup will be because you draw less amps, and experience less loss through cables, batteries, motors, etc.
it’s the same reason high voltage power lines exist, you can move more power, with less losses.
The only issue is long wire inductance, voltage spikes, and whether your ESC can survive 12s daily.
the power lines use high voltage to transmit power more efficiently but you cant get a more efficient motor running higher and higher voltage. in the motor the amps and volts it gets isn’t even what would show on a watt meter coming from the battery. if you were to run a motor at a much higher voltage you will end up using more “motor amps” to get the torque for the same performance. The higher voltage will give you more inefficiency for the same performance as the lower voltage.
but that’s using grin motor simulator you can find and I’m not sure if it shows for the whole vehicle including all electronics in its output. maybe its just the esc that creates the increased loss with higher voltage but don’t think so