Thanks for your comments Jack.
Sorry for confusing the issue, the cells, BMS and wiring diagram in your original post would all work. Also given that the original space cells are 40A rated I would assume that 40A is enough to power a e-board and you should be right to go with your intended setup.
You are right with regards to the battery capacity. The battery capacity will be the total of the single cell capacity times the number of parallel cells. The discharge current is also the total of the single cell discharge times the number of cells in parallel (e.g. for 2P @ 20A = 40A and 3P @ 20A = 60A). I think LG make a high discharge 3000 mAh cell so if you wanted a little more range you could go down that track, although as you say you you don’t need to go too far on one charge
The range of a battery pack depends on the energy stored in the battery pack and the amount of load on the battery. The stored energy in the battery can be worked out by multiplying the battery capacity with the battery voltage. For example a 10S2P pack with a single cell capacity of 2500mAh ( a total of 5 Ah) would give you 180 Wh, To work out how long this battery back would last you need to divide the amount of available energy by the load. So for a continuous 740w load, this battery pack would last about 15 minutes. Note that it would be unusual to have a continuous load in a e-board application and real world figures would suggest that you would get more like double this run time.
The main reason I went to a 3P pack was to achieve a higher maximum discharge current to allow for the extra load when I go up hills, and so I could run two motors. Having said this I think it would be very rare that I would even get close to 60A’s. You can decrease the amount of current drawn from a battery by placing more cells in series. To explain this, P(power) =V(volts) x I(amps), so in lox897 example if you use 10S (36V) you would draw a nominal current of 20A, if you stepped up to 12S (43.6V) you would only draw about 17A (sorry if this is teaching you to suck eggs). I guess the important thing with current draw is to give yourself a bit of a buffer between your expected current draw (load) and the battery maximum continuous discharge for instances when you use more current such as going up hills and starting.
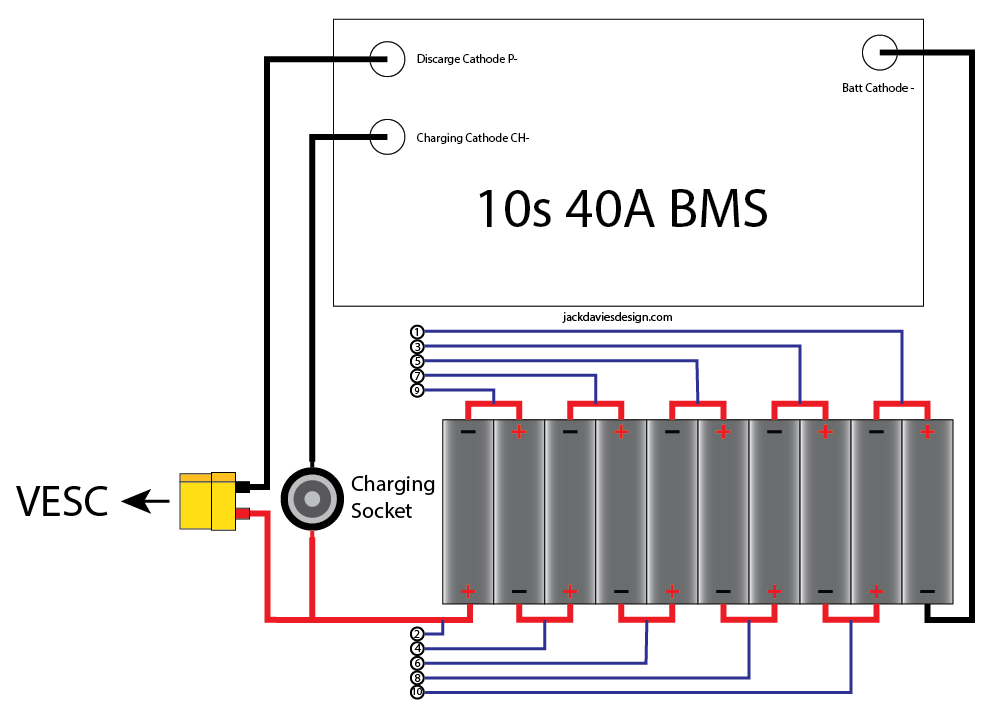
I am happy with my BMS and I haven’t noticed any signs of over heating (its hard to check when you are using the board). The BMS you have linked to actually looks very similar in design to mine, just a little smaller which can probably be attributed to the lower current rating. Basically you need to match your BMS cutoff current with the maximum continuous discharge of the batteries, which you have in your example. I would be a little reluctant to put the BMS on top of the batteries as you will get some heat from the BMS (mostly through the transistors/FETs, but also a little from the discharge resistors). If you shield the batteries enough from the heat from the FETs you will probably be okay though.
The shrink wrapped thing in my pictures is a capacitor which is wired to the battery terminals of the speed controller. I have since swapped this style of cap to the cap board used by others such as Vedder, Enertion and Chaka.
You mentioned your board is very flexible, I would be careful with this with any battery pack that is assembled using solid links. For your application you might be better of wiring each set of cells together with flexible wiring to ensure there are no torsional loads placed on the links between packs. This is partially the reason I have my battery back sitting in a CF tray.
Sorry for the long winded reply but hopefully this helps.