Hey guys, just thought I’d show off my latest build. Certainly not the fastest board out there, but I think it makes a decent cruiser.

Some of you may recall the crazy 8 wheel longboard I was making. Long story short, I kept running into issues with the 8 wheel all summer long, and it never felt like a finished product. So, I never posted anything about it. Now, the 8 wheel longboard can finally rest in peace. Here’s a link to a post wrapping up that project. You can also see the process for making the recycled parts here: http://www.electric-skateboard.builders/t/8-wheel-build-36-kicktail-vesc-4-12-dual-om5065-200kv-2-2kw-10s-10ah-custom-enclosures/25708/24?u=alanhunt123
Many of the parts for this build came off of the 8 wheel, namely the deck (36" skateshred cheapy), the trucks (Paris 185mm), the battery ( custom 10S4P Samsung 25r), the custom sheet metal case I made for the batteries, and the FOCBOXs.
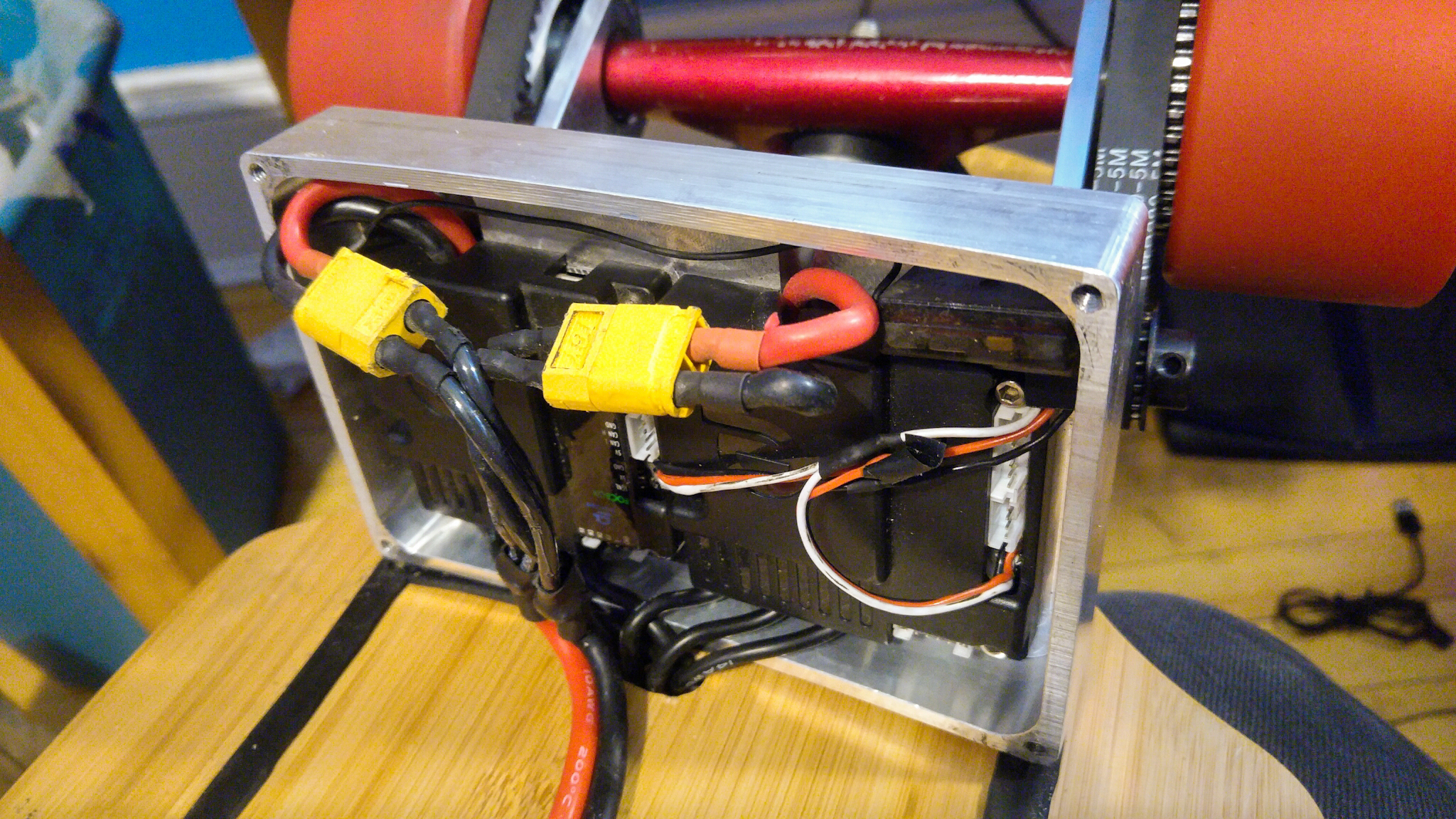
The FOCBOXs are housed in a custom enclosure that I milled out of aluminum. The inside has a copy of the original profile from the aluminum plate the ESCs came with built into the enclosure. This saves a bit of space and weight (also provides direct heatsinking to the environment. I’m sure that I could run 80A continuous if I ever wanted to).

The motors are the Racestar 5045s from Banggood, and they’re pretty much the same thing as the 5065s from Ollinmotors, but with a shorter can. Banggood also sells 5065s for the same low price (around $41 each). I find these motors have plenty of power for a moderate speed setup for my 175lb. Certainly not going to win any races against some of the other builds on this site, but it’s plenty of power for me. They’re mounted to some custom CNC motor mounts that I made. They are a single piece that has a circle cut out that is the same diameter as the trucks. I drilled a small indent into the trucks, and put a set screw with red threadlocker to hold them in place. We’ll see how long that lasts. If they move, I can always JB weld the set screws, or just come up with a better motor mount design (these were really simple to make, however, since there was only one crucial tolerance to hold, the circle cuts, which had to be made to fit each side of the truck individually).

Yes I know I’m missing screws, heading to the hardware store tomorrow.
Here are my VESC settings, for those curious what works for these motors:
Motor Min/Max: -70/90 (gives a lot of startup torque!) Battery Min/Max: -7/25
Currently running a 14/40 ratio, tops out around 23MPH. But there is endless torque for climbing hills! Easily does 25% grade at 15+MPH (haven’t scientifically proven this).
Overall, I’m very happy with this build. Plenty of power, and so much lighter than my stupid 8 wheel… that thing weighed like 30 pounds. Plans moving forward are to redress the griptape on the top of the board (you’ll get to see it when it’s done!) and move up from 83mm to 97mm wheels. Should bring the top speed up to around 27MPH, which is perfect for me.
Cheers!


 if you made a caliber version you could sell a few.
if you made a caliber version you could sell a few.