This is my second esk8 build.
Goal: Flexible lightweight customizable e-skateboard with easily removable battery.
Deck: Loaded Vanguard. When I got this deck and first rode it as a regular longboard, I liked it so much that I thought I should just leave it as it is without electrifying it. But I eventually put a motor on it. However, I want to make a setup where I can easily remove the battery and other components and convert it back to a regular longboard.

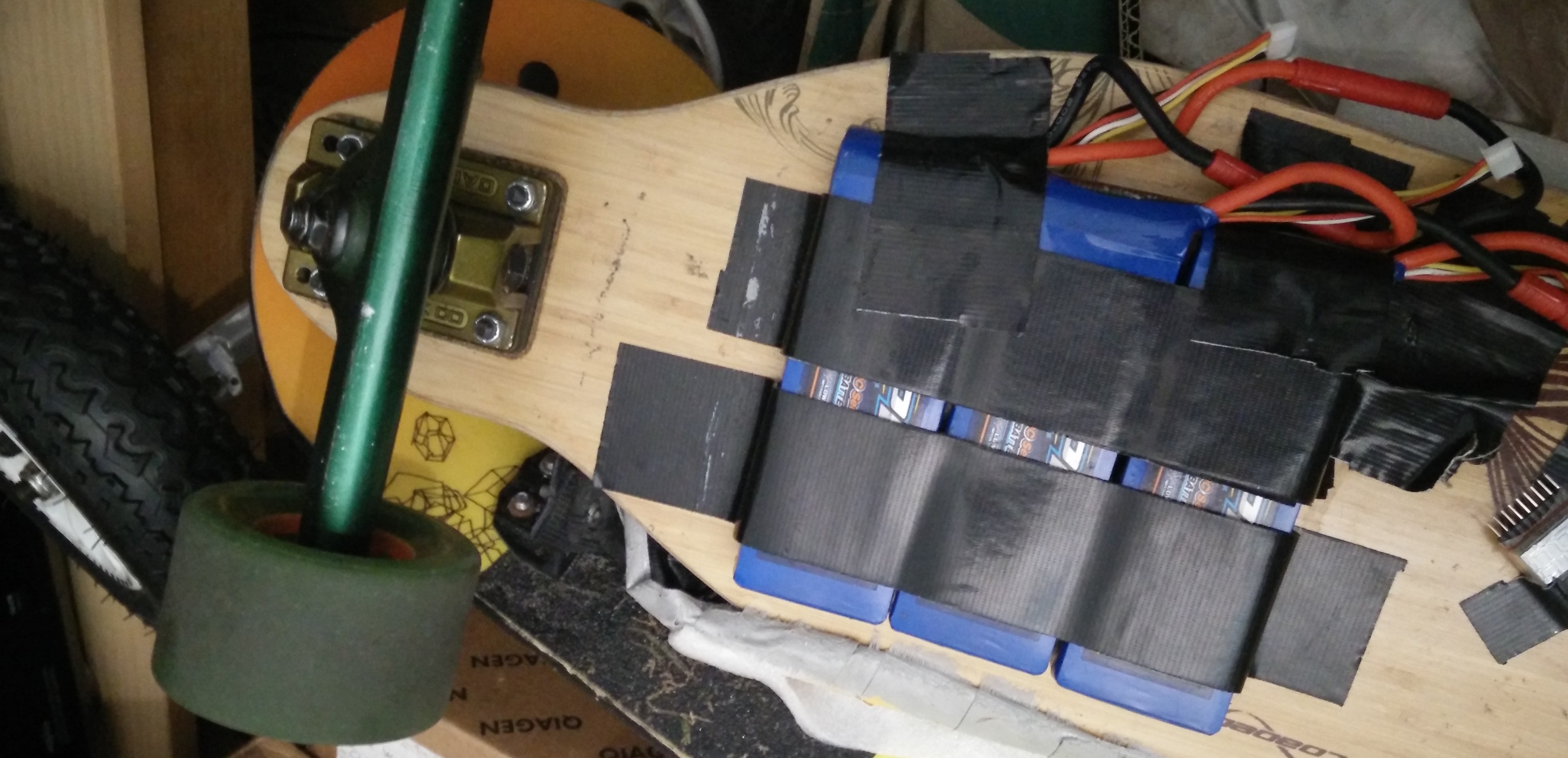
This is how it looks with electric components:

Currenty, all components are mounted to the deck with Gorilla tape. I did not put any screws etc because I am going to experiment with different layouts of the components. Eventually, I am going to make a nice looking board with custom enclosures. But I will try to avoid making any holes in the deck and putting any screws. In my first build, it was a pain to make inserts for screws. In this build, I am going to attach everything to the deck with silicone caulk. Silicone will provide extra flexibility of attachments, which should be good for a flexible deck.
I am considering various options for attaching the covers for the battery and VESC. I want to make a system where I can easily exchange the battery on the fly without unscrewing any screws. One option is to attach them using rubber cords.
Drivetrain: I am going to experiment with different motors, gear ratio, batteries, etc.
Current setup: Single Torqueboards 6355 190kv motor with 13/36 gear ratio, 83mm Flywheels.
Other options:
(a) Dual Torqueboards 6355 190kv motors
(b) Single Torqueboards 6374 190kv motor
© Dual Sk3 5055 280kv motors
Battery: 9s1p lipo, more precisely 3 3s1p 5000mah 20C Zippy lipo packs connected in series. This is how I mounted them with Gorilla tape:
I am making a custom fiberglass cover for the battery.
This is how it currently looks (still needs some glazing trimming and polishing with sandpaper):

VESC enclosure is made out of a plastic food container. I will also replace it with a fiberglass one:

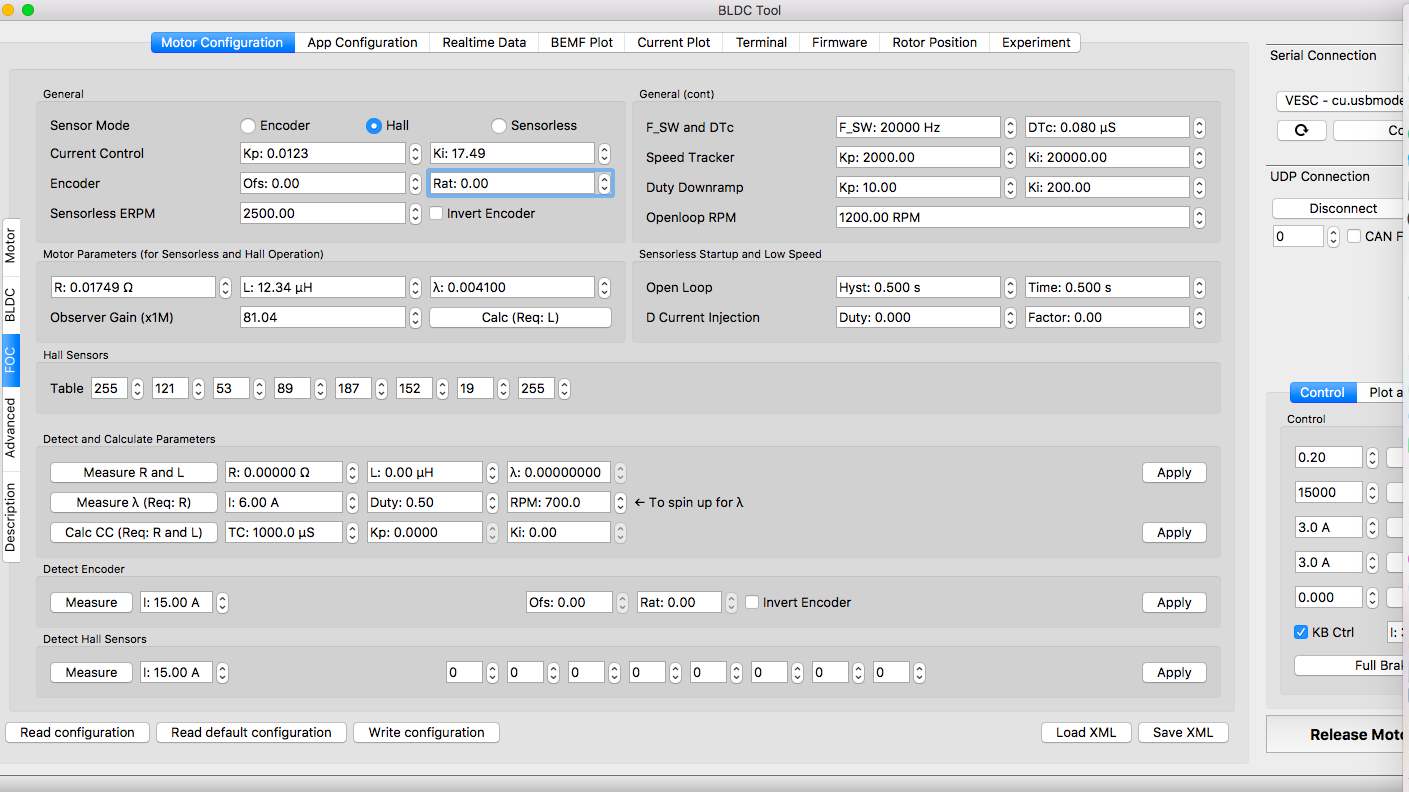
VESC-X settings: sensored FOC mode

Remote: 2.4ghz Mini Remote
I rode the board for about a week and it is pretty sweet.
Today, I was riding the board, checking FOC mode and testing the range of the battery … and I’ve got a
BIG PROBLEM:
At some point, while riding, I noticed that the board is making slight jerking movements. I stopped, checked everything. Everything looked Ok, so I continued to ride. At first, the board was riding normally, but then the jerking movements started again, and then become stronger and stronger. The motor would erratically accelerate and brake even if I did not touch the remote. Then I turned the remote off, and to my surprise, the erratic accelerations and brakings continued. The board was totally out of control. So I turned it off, removed the drive belt from the motor, and finished the rest of my trip by pushing the board. When I tested the board at home, it again seem to work normally, and there are no error codes in VESC. The lipo battery has about 1/2 charge in it: All 9 cells have the same voltage 3.79 Volt.
So my questions to everybody: Do my settings look Ok? What is the most likely reason for erratic behavior of the skateboard? What is the weakest link in my setup?
Here are some ideas about possible reasons:
-
I have not changed the AA batteries in my mini remote for a while. (I was using this remote in my first build.) So far it worked without a problem. Maybe now the batteries need to be replaced. But, as I said, the erratic behavior continued even when I turned the remote off. I guess this eliminates the possibility that the problem was in the remote. Or does it?
-
I read on this forum many horror stories how FOC fired VESC. In particular, FOC is sensitive to the length of the cable between the battery and the VESC. The cable needs to be less then 30cm. I am using Boosted board style layout with battery in the front of the board and VESC in the back of the board. The length of the cable between the battery and VESC in my setup is longer than 30cm. I was riding in FOC mode last 3 days and it seemed to work fine. But maybe today FOC started to act up.
In my first build I was using BLDC mode. In the second build I wanted to try FOC. I like how the motor sounds (almost silent) in FOC mode when I am riding at slow speed among the people. But, frankly speaking, this is a very minor advantage. At normal cruising speed, FOC is as noisy as BLDC. And at slow speed, when I am riding on a pavement among the people, I think it is more convenient just to push the board and not use the motor at all.
If there is a chance that FOC (long battery cable?) can cause such erratic accelerations and brakes I am definitely switching back to BLDC mode.
Are there any other possible reasons?
