Hi all! Thanks to Instagram user mrhandsk8board for letting us know this tread exists! We are totally stoked that we are on your radar and people are discussing us! I hope we can clear up any questions you guys have.
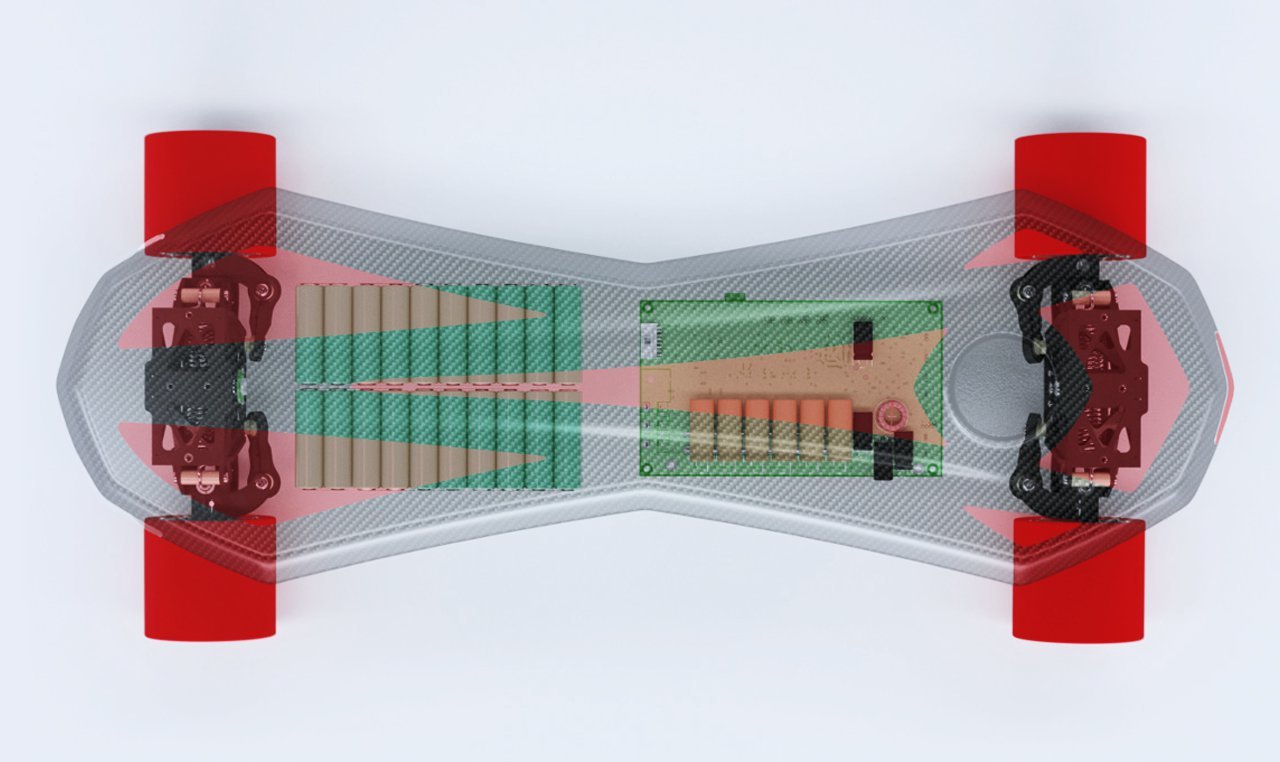
EVie only has two rear hub motors, the front wheels are not driven, but are designed to look exactly like the rear wheels for aesthetic reasons.
The Foot Pad:
You accelerate and decelerate the board by twisting a foot pad with your back foot. It does take some getting used to. You’ll have to keep a lot of your weight on your front foot, and be comfortable letting your back foot shift around to be able to use it successfully, but that’s how I normally ride anyway so it works well for me. I think some people will love it, and some will totally hate it… but that’s okay. To me, I think it’s pretty sick when you get into a rhythm of brake - lean - go, all with your back foot. Nailing a turn perfectly like that feels amazing  . Besides that you have your hands free to carry stuff, and don’t have to mess with a remote.
. Besides that you have your hands free to carry stuff, and don’t have to mess with a remote.
The Ackermann Steering System:
Let me start by saying that regular skateboard trucks are currently a superior design. Trucks are so simple, elegant, effective and robust. To be able to change the ride characteristics so dramatically by turning a single nut is a genius design. But skateboard trucks are a mature design and have had decades to evolve. Our system is way more complicated and clunky. With a design like this, lots of things can go wrong, and have. I’ve been thrown off the board more than I would like to admit due to a steering system failure. However, I think the complexity of our design may be worth it because it holds a lot of potential. First off, it carves really really hard! Riding it is also way more fluid than regular trucks, there is almost no resistance to turning. You kind of just fall into a turn, and trust that the board will turn in to catch you. I think with this system we can also narrow the gap between low speed agility and high speed stability better than a regular skateboard truck, but we still aren’t there yet. The way it handles is definitely different, and will probably be another love it or hate it kind of thing.
Torque Vectoring:
@Hummie Our wheels are torque controlled not speed controlled, so the wheels are totally free to rotate at different velocities. Even if all 4 wheels were speed controlled, if one wheel saw more resistance than the others it would rotate slower unless they were all locked together by the drive train (like a single motor with belts to each wheel or something) So yeah you can speed wobble in a powered truck, and we have.
So our system has a 6 degree of freedom inertial measurement unit on board. Its the same group of sensors that help to keep drones stable. It can basically sense the roll pitch and yaw velocities of the board, as well as accelerations in the x y and z direction. Knowing this, we are able to sense when oscillations (speed wobbles) are occurring. Our system then provides a differential torque to the wheels to try to stabilize the board. Basically if you wobble to the left, the board will try to turn you to the right and vice versa. We aren’t able to provide enough torque to totally kill the wobble, but it makes the wobbles less extreme, and gives the rider more time to sort it out before the wobbles get out of hand. It’s still not a perfect system, but it does help. Unfortunately it will also slow you down if you try to carve aggressively, which I love to do, so I ride with it off. We’ll keep improving the system and hope that one day it will save someone from injury or worse.
Let me know if there is anything else you want to know! This is great feedback so please keep the comments and criticisms coming!








 Actually, that would be an excellent idea, and there is no reason not to.
Actually, that would be an excellent idea, and there is no reason not to.