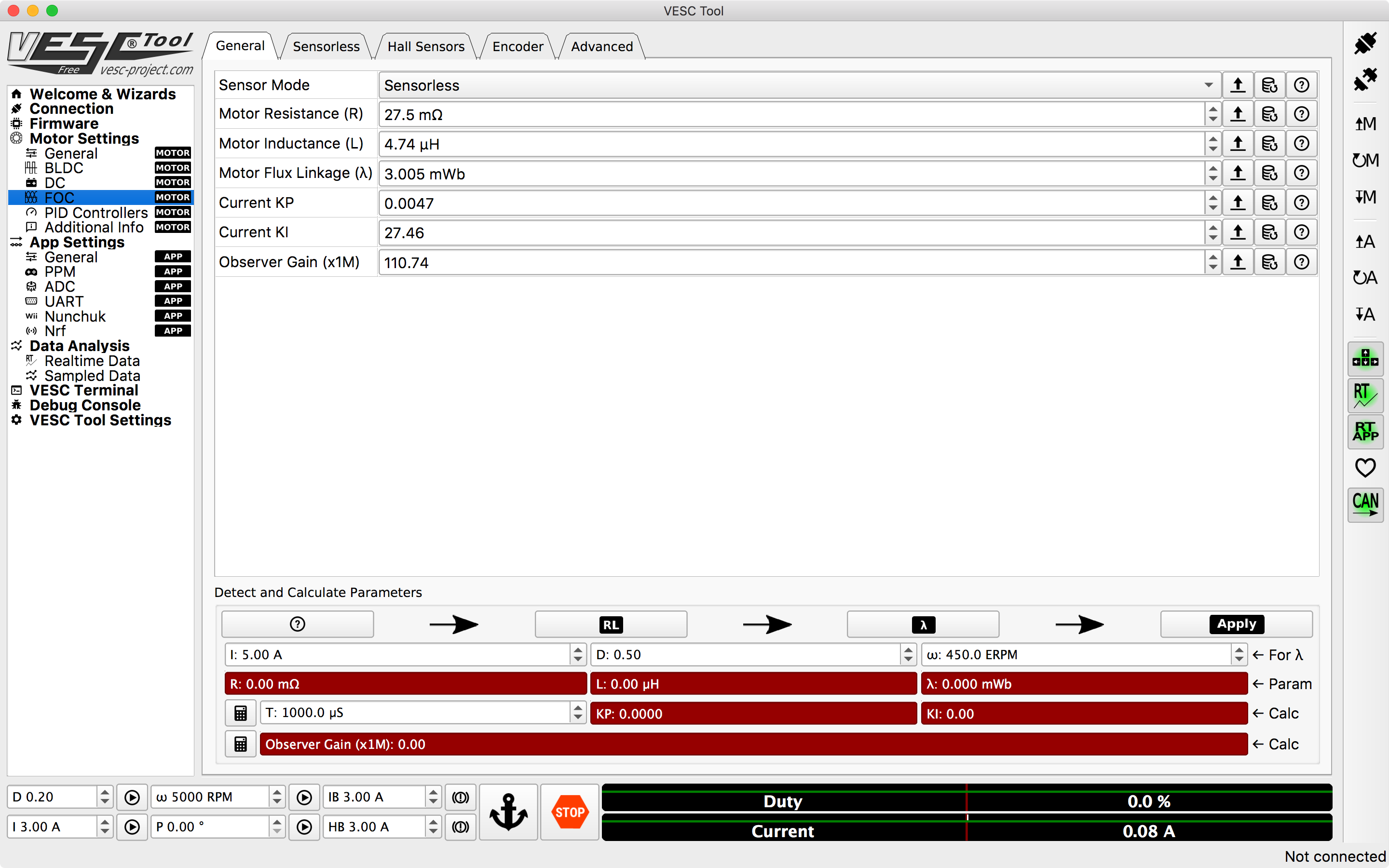
Your boxes in the foc tab should read green even if you’ve disconnected and rebooted the vescs. Currently it is red with zeros. Meaning you haven’t performed a FOC detection.
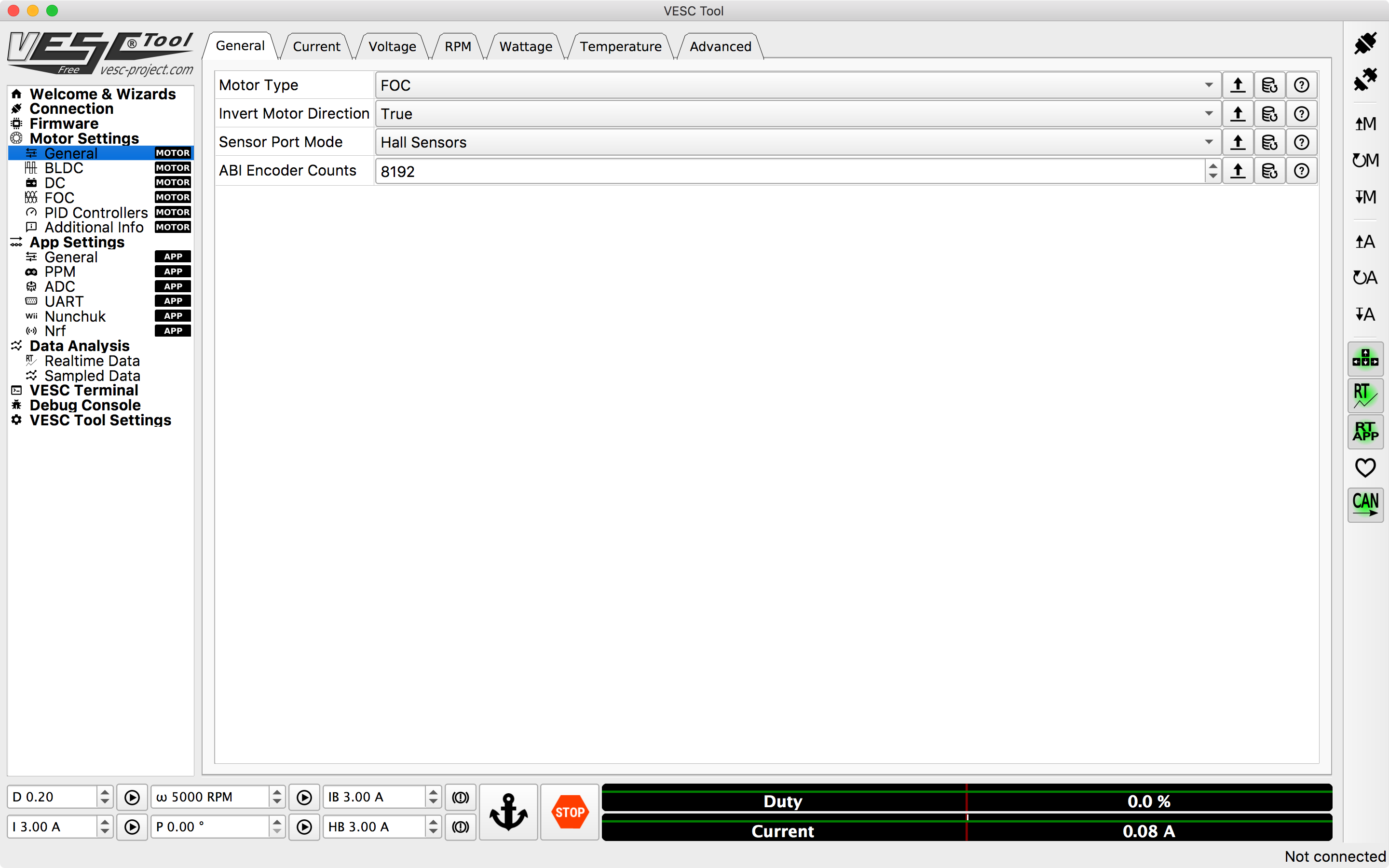
Redo the foc detection. Then go-to the hall sensor tab and detect sensors. Make sure you write motor config M^ on the right when you are completed…
Also the noise may be similar under no load(board upside down and throttle up). The noise difference is heard during applied load, it’s different in the way it modulates torque so they sound different under load.