enertion’s mounts are a bit lighter because they’re half carbon fiber and they fit 50mm motors. I currently have diy wheel pulleys for kegels but will probably switch to enertion’s and chop my trucks because i want to use my 83mm wheels and the pulley is a lighter plastic.
is the weight difference important are you trying to do a light as possible build??? i ask because it seems your current diy pulleys seem like they would be light enought
there’s no downsides on having lighter parts, so i thought might as well. I’d rather use 83mm wheels than kegels anyway.
Did this key stock work on Ollin’s motors? Need keys for my motors.
Thanks
it works, it’s just a little small so it’s not a snug fit, but it does what it’s supposed to. If you can find 3mm square stock, I imagine that would fit even better.
Small update,
I felt the center distance was a bit too tight for the belts, but the mounting bracket was already hitting the trucks, so I decided to grind down some of the hangar to give 1-2mm for the mounting bracket and ease up the belt tension.


Perfect!
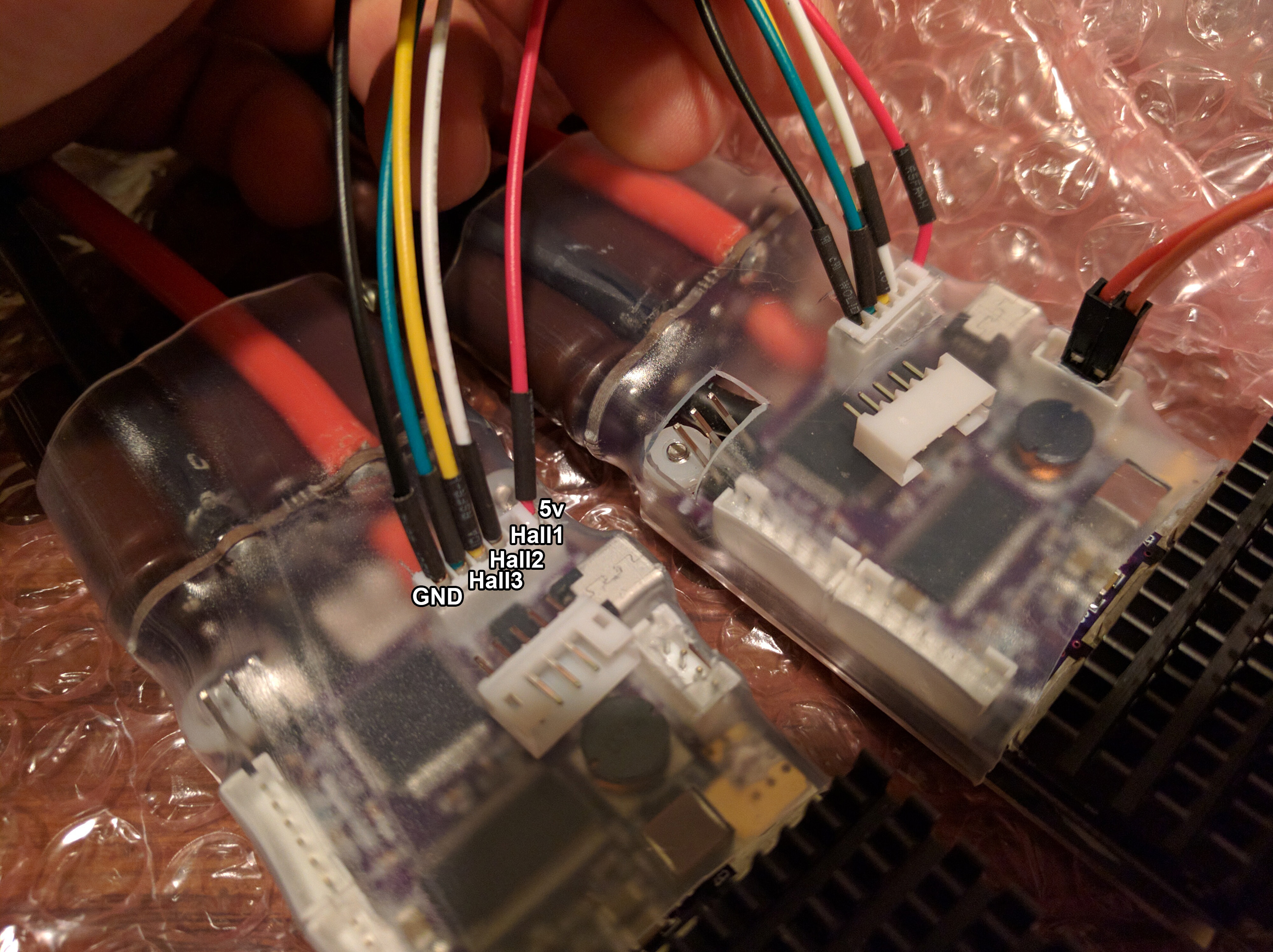
I also decided to try my hand at getting the sensors working since chaka doesn’t offer his adapter yet and I found super cheaper JST 5-pin headers on ebay
I soldered the headers and connected it to the motors and it works great! The only problem was that the VESC has 6 pins on its hall encoder header (6th pin is Temperature which doesn’t exist on the motors). So I took the power pin off the JST plug and placed it directly into the 5v pin and plugged the JST header to the corresponding pins on the VESC. It’s hard to explain but see this pic:

As for the front motor, I needed to extend the sensor wires so I stripped a CAT6 (maybe CAT5E) cable and soldered them to the JST wires. The colors didn’t line up so I tried my best with this…

9 Likes
Got my Space Cell Pro 4 today! Finished up the rest of my build as well 
Drilling holes for the space cell enclosure.

Nice and flush (well flush enough for me)

Double checking the programming… don’t mind the mess 

Test fitting. This eventually had the VESCs and receiver secured by industrial strength dual lock velcro.

All done!


13 Likes
This thing goes sooo fast. I’m used to full throttling on my Evolve GT on GT mode all the time, but I was scared by the speed and braking power of this board. So far so good, charging up to take to work tomorrow. Hope I don’t eat it on the way there.
2 Likes
I’ve got some quick questions :3 1)what sizes drill bit did you use to drill holes for spc4? 2)did you or are you gonna tread lock the spc4? 3) how did you bend the wires to the motor closer to the switch side?
-
i believe it was 1/4th inch. Don’t make the same mistake as me and try to widen it much further. My holes are a little loose (that’s what she said) and the nut doesn’t grip the wood very well. I’m going to fix this with wood glue.
-
No thread locker, it has enough tension i think, plus I’ll be opening it up to tinker.
-
I just bent them lol. Like i said silicone wire is very flexy.
1 Like
Took the board for my commute to work today (~4 miles). It’s been great, but tougher to handle than my GT; though this is probably due to me not being used to it yet. Acceleration is amazing and braking is better than my GT. Top speed is definitely higher as well.
I had an issue where the remote would seemingly cut out for a couple seconds, then start working again. I’m not sure if this is a connection issue, or if there’s some fault in the VESC or maybe it’s rebooting for some reason. I’ll have to investigate this further. It only happened twice. I’m not sure if it’s related to me using 43v as max input voltage, but I doubt it.
Settings for those curious

Hehehehe at the that’s what she said joke coz I’m secretly a 13 year old boy on the inside
nice build, this is proof that Onloop and Chaka can play nicely together 
5 Likes
Awesome build, do post videos if you can!
Great build!
Were you using the Benchwheel or Winning remote?
What do you think you max range is based on your 4 mile ride?
I’m using the winning remote at the moment. I ride a lot of hills and through a ton of wind on my way back, but I’d say 12 miles through all that. However! I was accidentally running sensored instead of hybrid, so I’ll probably have better range now that i switched it.
I’d just increase your max voltage to 45 and keep it safe.
Better to see if that’s the issue than look over every single connection for 2 hours only to realize they are all good 
already did! it’s at the default 57v max. still having the cut out issue. i haven’t rode in hybrid mode yet though, so maybe that’s it
1 Like
What kind of range do you get on your GT doing similar riding?
I’m kind of surprised to hear you say the estimated range on your build is only 12 miles.
Also, how do you like the Calibers vs dual kingpin?
Well i went 3.7 + 3.8 + .4 + .4 miles and ended with 32% battery which is 8.3. After the math I should get 12.2 miles for 100% of the battery. However, like I said, I went through a lot of hills and heavy wind resistance so that’s not surprising. I also, ran on sensored the entire time which is inefficient at high speeds Who knows how much I would get on flat ground running hybrid mode.
My GT gets about the same, but it’s hard to tell since the battery meter on the GT is very bias and doesn’t reflect real world value. 100% to 90% drops very slowly (99% after 4 miles), but after 90 it goes to 60-70 a bit faster, then after that it drops very fast (especially after 40%). I’d compare it to the range I’ve been getting thus far on my board.
I love the dual kingpin on the GT, it makes turns very pleasant and I have had zero trouble controlling it at high speeds. However, my DIY board goes much faster than the GT so I think I like the stability of calibers for my DIY. One thing I do miss about the trucks is the length. My GT’s trucks are a whole 5-7cm wider and it makes for much more confident turns. I sometimes feel like I’m going to topple over on my DIY when turning too aggressively.
1 Like