I like this discussion a lot but there is a lot of misinformation circling around. I am not an expert on VESC or BLDC motors but in physics and maybe I can clear some of the fundamental misconceptions:
Of course people are right: hub motors are not cooled as efficiently inside the wheel. Even worse: there is rolling friction. Your board doesn’t roll forever because the kinetic energy is lost and heats your bearings, the road and your wheels. So the motor is right where you get most of the friction. But what most people completely mix up in this thread is the following
What actually heats the motor the motor in the first place?
Short answer: Losses! Not the Current, not the total Power.
The Power dissipating into heat is NOT the total power. Let’s consider a simple scenario for now: we accelerate, no rolling friction or air friction. Energy E is conserved, so E (P is the change of E over time), is split up into two main channels: kinetic energy K, and the loss L:
E = K + L
All the energy that actually contributes to accelerating you does NOT produce heat at this point. It will eventually since you don’t roll forever. But for now it does not. Only L. The efficiency is the portion of E that you can get into K instead of L. This is where @HTownBomber is wrong: a motor is not simply a resistor. The power consumed by the motor is P = U*I but that it not the power that dissipates into heat like in a resistor.
The statement that only P matters, not how you distribute your numbers in U and I, is wrong because the efficiency changes!
One part is electrical loss simply trough the electronics resistance R. The loss due to R is NOT the product of the total battery Voltage Ub, since only a portion of Ub drops over R: Ur.
Only the rest of the power is USED by the motor. But the total battery current I passes through R:
P = Ur * I = R * I²;
This is the reason why we use high voltage transmission lines. You cannot avoid resistance altogether. So keep the voltage high and you increase the portion of Power that you can USE. But, as @Hummie pointed out, this does not apply to the motor windings: lowering KV reduces I but increases the resistance and the copper losses are the same. It does however apply to the rest of the electrical components and especially the ESC is more efficient at high voltage.
Apart from the electrical loss there are the typical BLDC motor characteristics. As I said: I am not an expert for BLDC motors but there are some rules of thumb that you can easily apply. The properties of a typical BLDC motor should look somewhat like this:
http://www.mellorelectrics.co.uk/BLDC-performance-graph.jpg
http://www.mellorelectrics.co.uk/BLDC-MOTOR-EN.html
N: RPM
EFF: efficiency
P: power
I: current
This an idealized graph for ONE specific motor, and this is imporant: for one KV value (RPM/Voltage). One important fact that people should pay more attention to is that the maximum power is not where you find the maximum efficency!
To increase efficiency you should run your motor at a high RPM and low torque. This is why you should use a small motor pulley and a large wheel pulley in a timing belt setup. This can bring you to the left side of the graph, where the efficiency is high.
Also you can lower KV, which should more or less scale the x- and the y-axis. It will give you higher torque at lower current. Therefore you can keep the torque load further from the maximum that the motor can do. Reduce the speed, increase the maximum torque, then you can shift the maximum efficiency to lower RPM.
To estimate what “high RPM” means we can calculate some numbers:
The largest gear reduction that you can usually get is around 12:36 . Let’s assume we want a maximum speed of 35 km/h (21.7 mph). At 83 mm wheels this means the motor will run at ~6630 RPM. The KV that you need for this at 12s is ~150 RPM/V (!!!). This way you can run your motor close to the maximum efficiency.
What makes hub motors become so hot? The lowest KV of a hub motor that I have seen so far is around 75 RPM/V, which leads us to a theoretical top speed of 52.7 km/h (32.8 mph)! So why do you not reach it? If you can’t get close to this RPM it means that your load is too high! You run at a regime at too high torque load, too high power (center of the graph), and low efficiency. Your motor will get hot because it wastes a too much of the precious power from your battery pack!
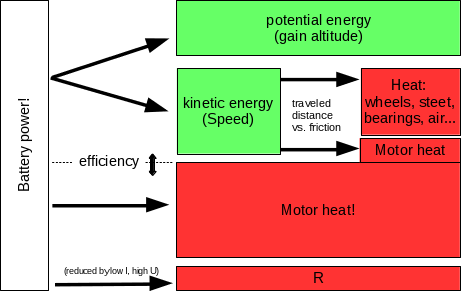
As you accelerate you climb up the blue curve (RPM) and the efficiency climbs up with it. Your motor has a comfort zone. But you can only get there if you don’t use all the torque, that it can offer. Here is a cheesy flowchart to illustrate my point graphically: