I’m currently sourcing parts for my first build and am learning along the way.
The biggest design constraint for me is climbing a fairly steep hill on my commute (10-15%), and my weight (~115kg)
I have decided to go with the Tacon Big Foot 160, and have built a small spreadsheet calculator to understand what kind of pack I want.
However I’m stumped when it comes to understanding the motor specs… I’m much more familiar with brushed DC motors where you are given some nice parameters to work with:
Stall Torque (at given voltage)
Free speed (at given voltage)
You can pick your gearing ratio to get close to peak power at ~50% stall torque, and you can assume that both free speed and stall torque scale linearly with the voltage (ball park estimate).
I feel like I’m missing a bunch of data for the Tacon:
Sure, it’s 2600W… but at what torque and voltage?
Does a BLDC motor have a stall torque?
Is there anyway to estimate these? Do BLDCs have entirely different characteristics that make the calculations vastly different?
If I understand correctly, you are looking for the formulas that will give you values on performance, consumption and limits. Most of that can be found here…
Or check out this thread for a discussion on the formulas…
Actually, that’s not really what I’m looking for. I’m less concerned with max speed, and more concerned with actual power and torque.
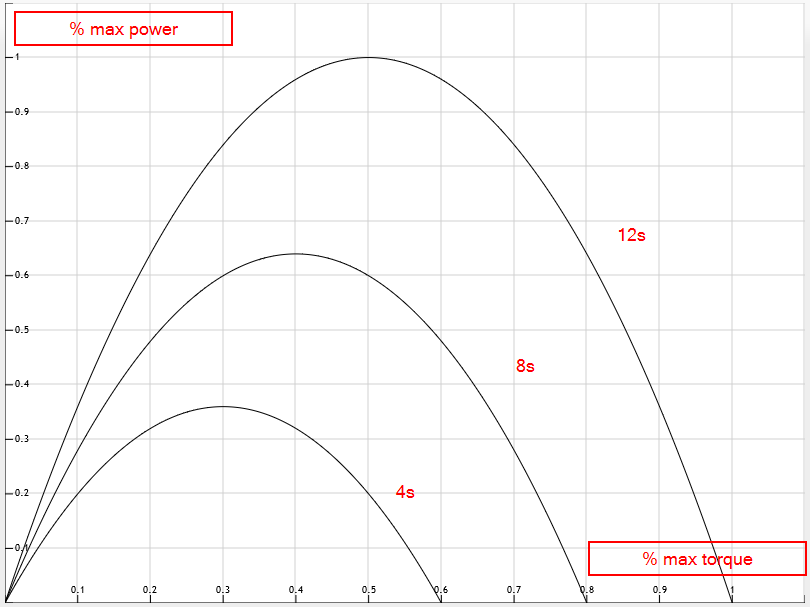
Here’s a mockup of the data I’d expect to find on a DC motor. Is it unreasonable to expect this sort of data fot BLDCs for some reason? maybe the way they are controlled doesn’t result in these sort of graphs?
So I’m attempting to make sense of the table data… maybe giving some more concrete questions will help get answers!
I see that the Internal resistance is 0.03ohms.
So let’s say you stall the motor and apply a voltage… you’d reach the “peak efficiency current” of 75A @ 2.25v (this doesn’t mean anything really, just gives a ball park figure.
with a stalled 8s setup you’d get a smoke inducing ~1000A current.
**This seems to suggest to me that the battery voltage is NOT the limiting factor in a BLDC’s ability to produce torque. **
Is this true?
Assuming it is true, and If torque is the goal, is there any advantage with going with a higher voltage? will the current be lower for a given torque? Does Kt change with voltage?
Hiya I’m gonna take a stab at this… So my understanding is that voltage is not effecting our torque. Unless you account for how it effects your gear ratio… ie 12S is around 160kv wheras 6S is closer to 200kv typically. These changes will effect torque throughout the sytsem however. So lets leave that alone.
Torque is effected by current. That is why when your motor is unloaded it spins up to full speed at only a few amps… but when you stand on it getting up to full speed take significantly more amps. (depending on your gearing of course)
Sooooooo: to answer what I believe you are asking…
Yes voltage is important in deciding torque (but only because it effects which kv motor you use. lower kv = higher torque and lower speed
No, kv does not effect voltage think of it as a gear ratio from voltage to the motor. A 300kv motor would spin 2x as fast as a 150kv motor with the same voltage, but it would also have 1/2 as much torque (because it is a gear ratio)
This wasn’t a question but ill mention it, you also get more torque with higher current so if you still wanted more current but you weren’t going to change batteries or motors then you could adjust max current settings to get more torque. (this is also how you control brake strength.)
Voltage itself does in fact gain more torque naturally. Assuming all other parameters are the same, feeding more voltage to a bldc motor will generally increase its torque output. Ohms law tells us that a higher voltage with the same resistance will have a greater amperage. I found this out by datalogging rc cars as well, higher voltages seem to draw more current as well. The torque output of the motor is based on its load given/current draw. That graph you posted pretty much sums it up. It is hard to get an esk8 board to be extremely efficient. You do you, but in my opinion this calculation is rather unnecessary considering so many people have success with just the general kv gear ratio calculations. Any 50 or 63 size motor with the proper gearing satisfies many.
Thanks for the replies
I understand what you’re trying to say, I’ll try to follow up on your info with the following:
It is my understanding that motors are all current limited, so a 150kv motor would not be able to supply 2 times the torque of a 300kv motor, because the windings are smaller and thus can carry less current…
Yeah it’s just that a I feel like when it comes to torque you would be current limited even with a 4s… so V=IR doesn’t really apply if you have more voltage but the controller is lowering the PWM duty cycle (or however it works) to keep the current under the specified MAX CURRENT setting.
It always involves math. My inrunner is advertised at 3000w @ 50krpm. First find Horsepower. 1 Watt =.00134 hp. So 3000x.00134=4.02hp. Ok to find torque plug in. Hp x rpm / 63025 = torque. 4.02x50000 / 63025=3.19ft lb of torque. I would knock off 20% for efficiency.
Can you tell me how much amp that is? I found some suggestions that in general:
Kt=60/2piKv (Kt [Nm/amp] & Kv [Rpm/v])
But I have also seen that Kv is only valid under no load so I have no real idea how to calculate or find the Kt without the manufacturer’s specs or a Dyno…
U can easily get the kv off the Vesc test looking at voltage and rpm and convert from there to kt if you can do math. It would be at no-load.
dont know if you know but getting amps to the motor at low rpm, low duty cycle, low speed is done through the Motor amp setting. with the pwm at low speed there’s low effective voltage but you can have way more amps running continuously in the motor than have left the battery.
Cool! Didn’t know that (I have NONE of the parts yet, they are all on their way)
[quote=“Hummie, post:16, topic:25760, full:true”]
dont know if you know but getting amps to the motor at low rpm, low duty cycle, low speed is done through the Motor amp setting.[/quote]
Actually I think I learned this from another thread where you were discussing it with someone else.
The data output from the Vesc you can see there’s the motor amps and the battery amps and are two different limits you can set. The details on how you can practically have so many motor amps I don’t know o remember but am hoping you can tell me again! I envisioned it working somewhat like a transformer as the ultimate energy output from the battery and at the motor must be the same but at low speed u now have the low voltage through switching but very high current vs what registers coming from the battery.
That would be true if the motor was doing for example 3000w of mechanical effect.
The easiest way to realize this is to start from stationary, apply 3000w of electric effect and by using P[watt]=angular velocity [rad/s] * torque [Nm] we would get infinite torque.
This is not the case. This is when the efficiency curves comes into place. Lets say the motor will draw 3000w of power standing still when you crank the throttle. The efficiency at a certain rpm will let you know how much mechanical power you get for the electrical power you supplied.
Realistically at something low like 1000 rpm, efficiency is perhaps 1-5% so you get 3000w*0.05=150w mechanical power and 2850w of heat. As the Rpms increase so does efficiency up to a certain limit. So the real torque would just be something like 1.4 Nm. But then again you have your smart ESC that will limit the current in this situation to avoid burning the motor.
To answer the main question. A higher voltage will allow more current to flow through the motor winding and therefor increase the torque.
Your half there. Raising Voltage will raise the Watts a motor will produce but will not raise the current or amps that it can handle or flow through it. Amps or current stays the same. Some day I will put the raceboard on a Dyno. 3000w = 1.4nm or 1 ft lb of torque indeed. 3000w or 4hp= 1ftlb of torque nope sorry mate motors make better torque #s then that.