Hi guys, i have just finished making two awesome boards, one for me and one for my girlfriend, my one is dual drive with two 6355 motors and dual vesc my girlfriends one is single motor single vesc. her board rides like a dream but mine is just hard work. it has to much power it wont maintain a constant speed it just keeps pulling and pulling. it also has a little stutter when starting from a standstill.
i have messed with some setting to try and fix the stutter but nothing seems to work. i have the vesc set to master and slave as per information found on this forum does anyone have any other ideas of what could be causing the stuttering? Also does anyone know if there is a setting a can change to make the board more controllable at a constant speed instead of just pulling and pulling? both boards are useing the same controler so i cant see that that could be anything to do with it. my pulleys are 16t 36t on 80mm wheels so i dont think that is the problem.
and advice would be great. im now to the vesc so im still figuring out the settings.
It is currently windows and Linux, but he’s working on a mac version.
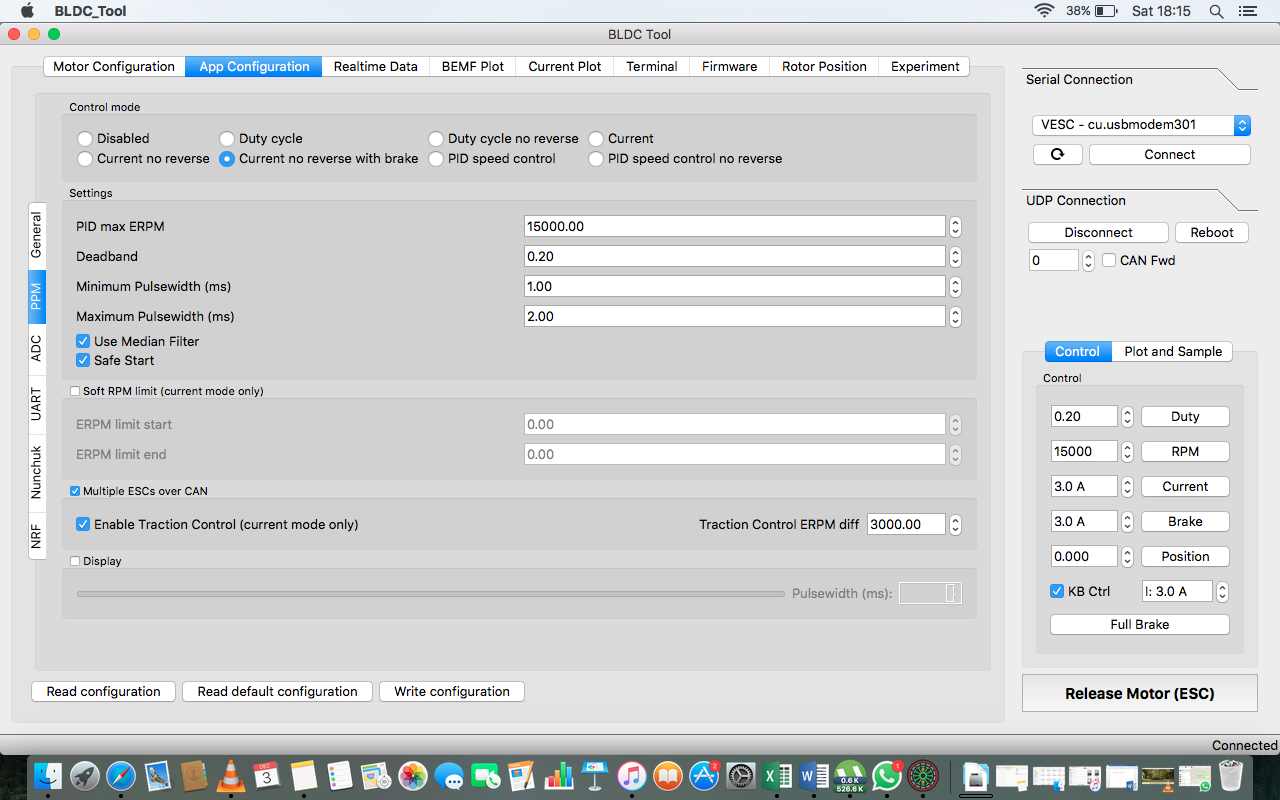
As for your settings, when the Mac one comes out I would definitely go for that, but in the mean time you could turn down your erpm limit and your battery current. And on an unrelated note, I would also set your low battery cuttoff higher than 8v.
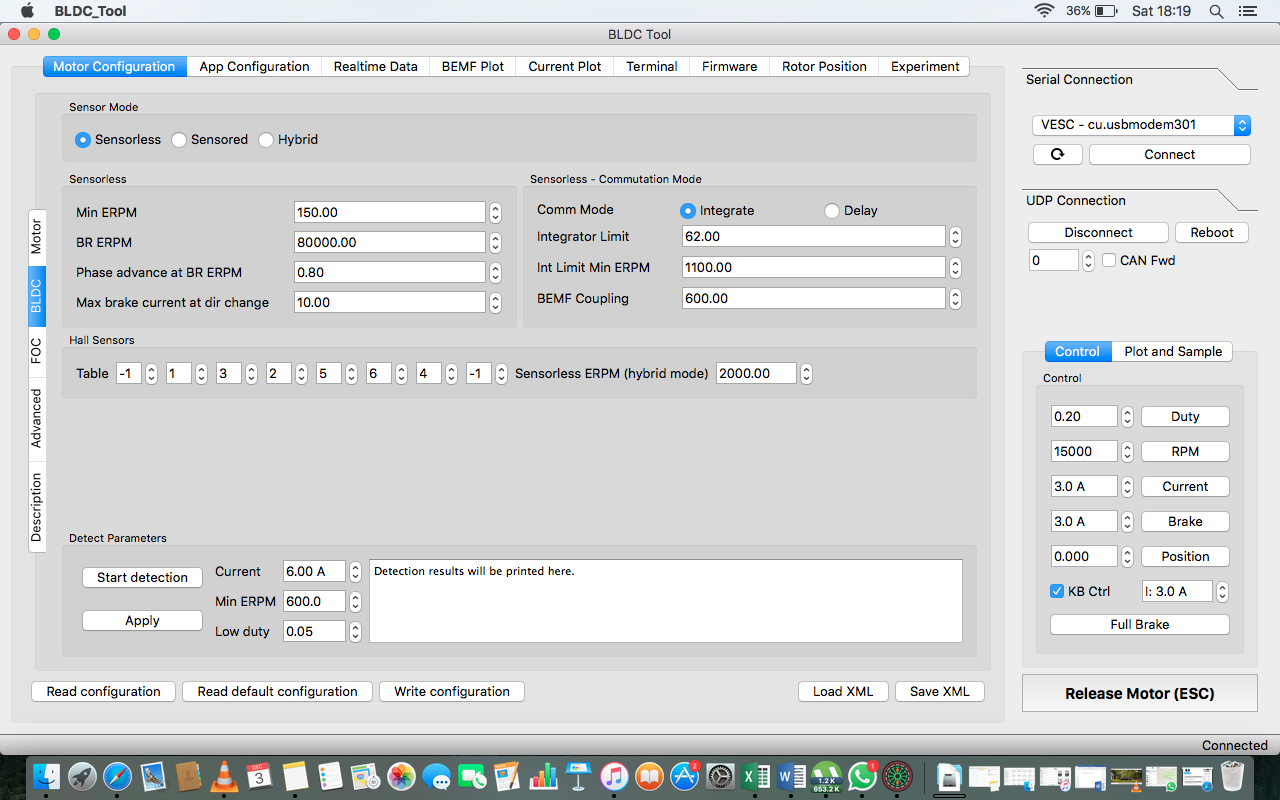
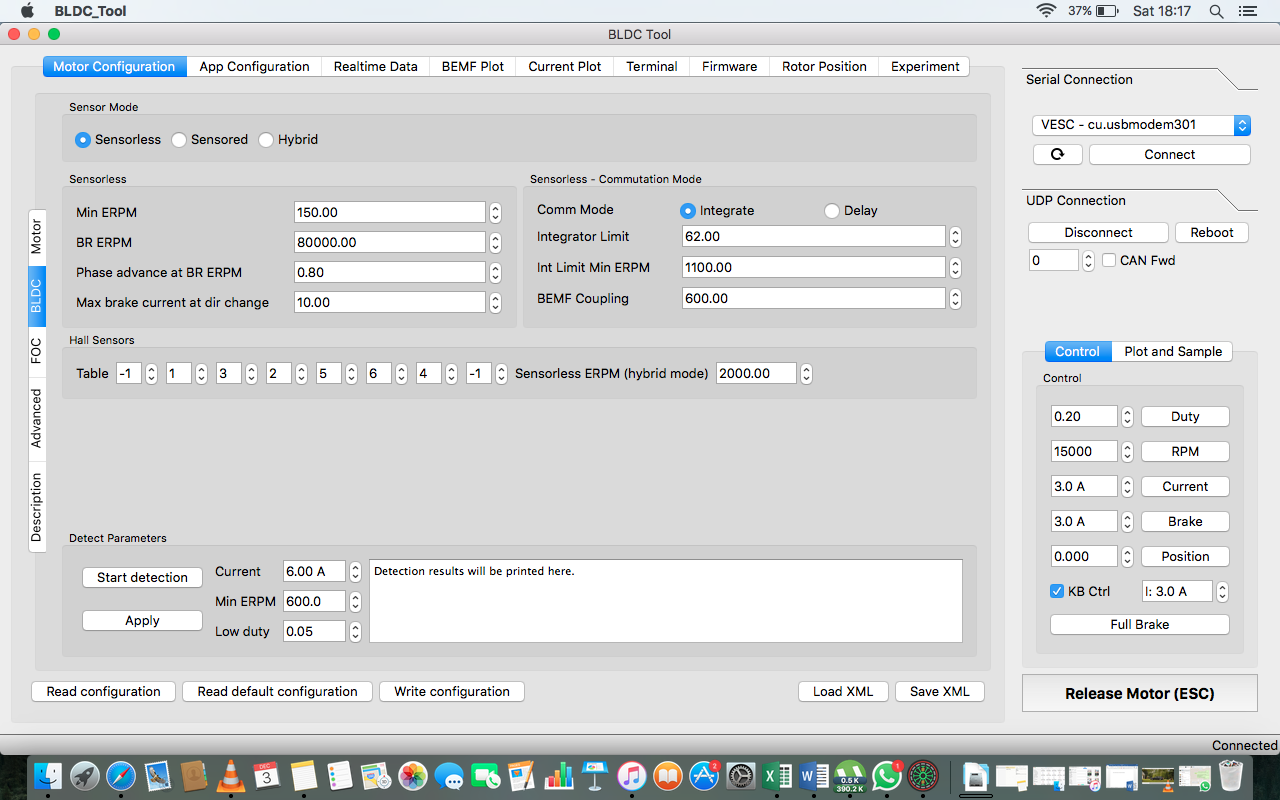
So 2 things. First of all you should do a motor detection. Because you didn’t do that for both motors. Second you should adjust the battery cutoffs. And third of all your board must drive like a monster.
Set the battery max to 30 on each VESC and try that first. If that is not enough then you can go higher. But 70 each is crazy. If you have a li-ion battery you might even damage it.,
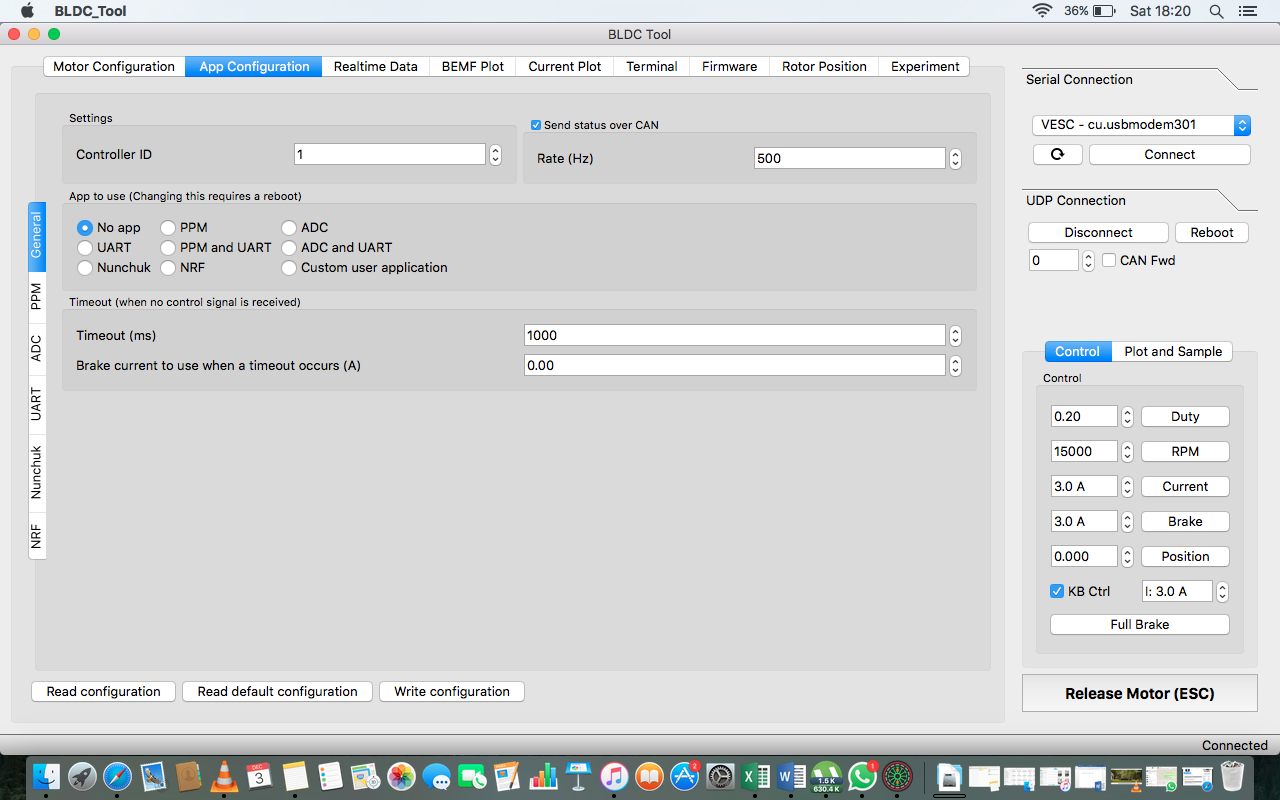
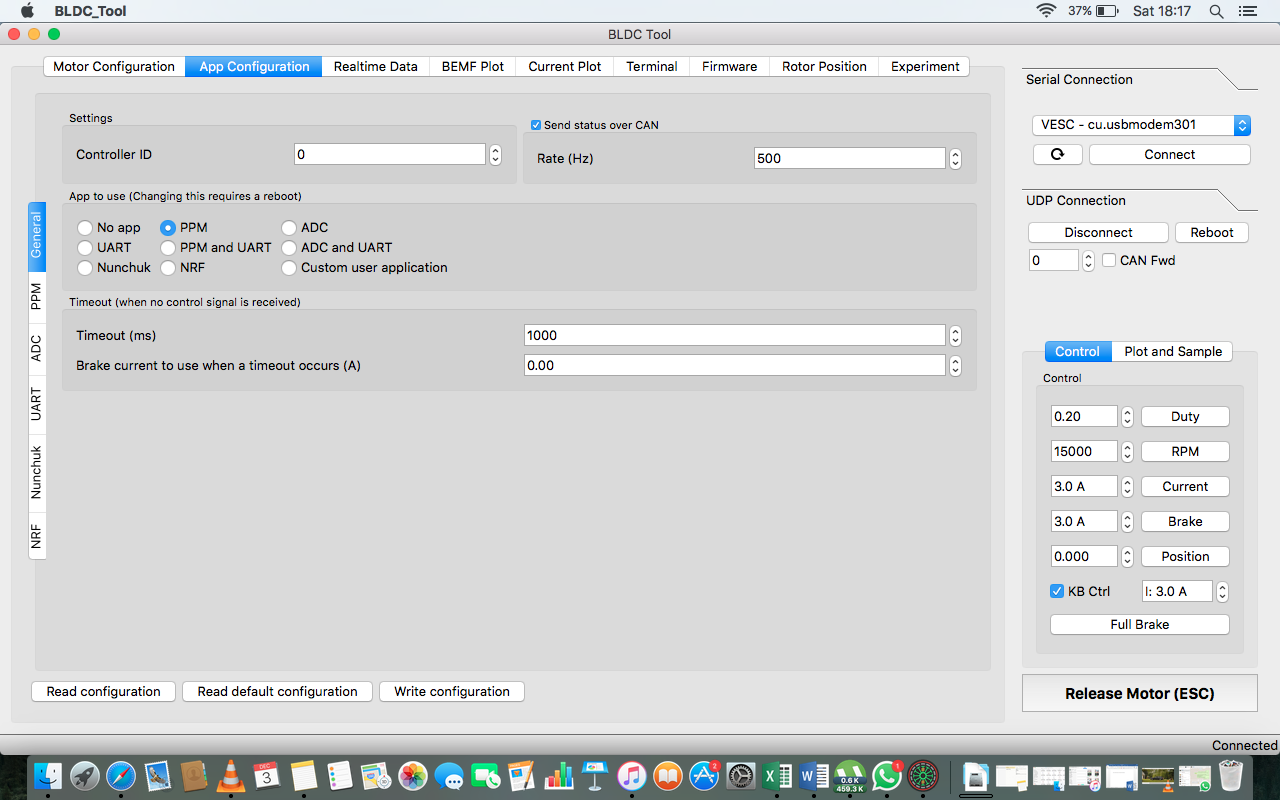
Your master VESC should not send the status over can in the aplication general tab.
Ok great i will change those now, it has a 17ah battery so there are 6 18650 in parallel 8 series so it is just a monster, hopefully changing those setting will calm it down a bit. i will change them now and let you know how it goes
Yeah you should definitely set your voltage cutoffs. Cutoff start is the point that your VESC will go into safe mode, and cutoff end is when it will stop altogether. Cellphones and stuff usually cutoff at like 3.0V but my cutoff starts at 3.4V and ends at 3.2V.
Since you have a 8S pack yours should be around 3.4 * 8 = 27.2 and 3.2 * 8 = 25.6
Also, If you’re sensorless and are having trouble launching, you could try turning up the startup boost. It’s under Motor Configuration > Advanced. I think mine is set to 0.40.
i made all of those changes and it is a completely differant board still mountains of power but it is controllable nd easy to keep a steady speed. i even set the cruise control and it just sat at a perfect speed. it would have never done that before. it just kept no going. Thanks so much for the help.
i have made a complete build video series that i will upload over christmas. i made the battery, motor mounts, enclosure all myself so it might be of some interest. i will also do a build post for people that dont want to watch videos.
i will do my best, do you think people would like links to a youtube playlist of the build? i have got quite a bit of editing to do but i will get them up asap and do a full build post as well.
If youve got the time. Ive seen alot of vids. They go from actual truck motor build then all of a sudden they are riding. Be good if there was a more detailed one on vesc set up. Motor detection. How you just resolved ths issue you had.