Ok so I completed my first build and it’s a dream come true until I got thrown off at 25mph and ate shit. Luckily I only have a few scraps but my brakes have been skipping as well. I’m assuming their most be a lot wrong the my VESC settings.
I weigh 195lbs
Motor TB 63 190kv
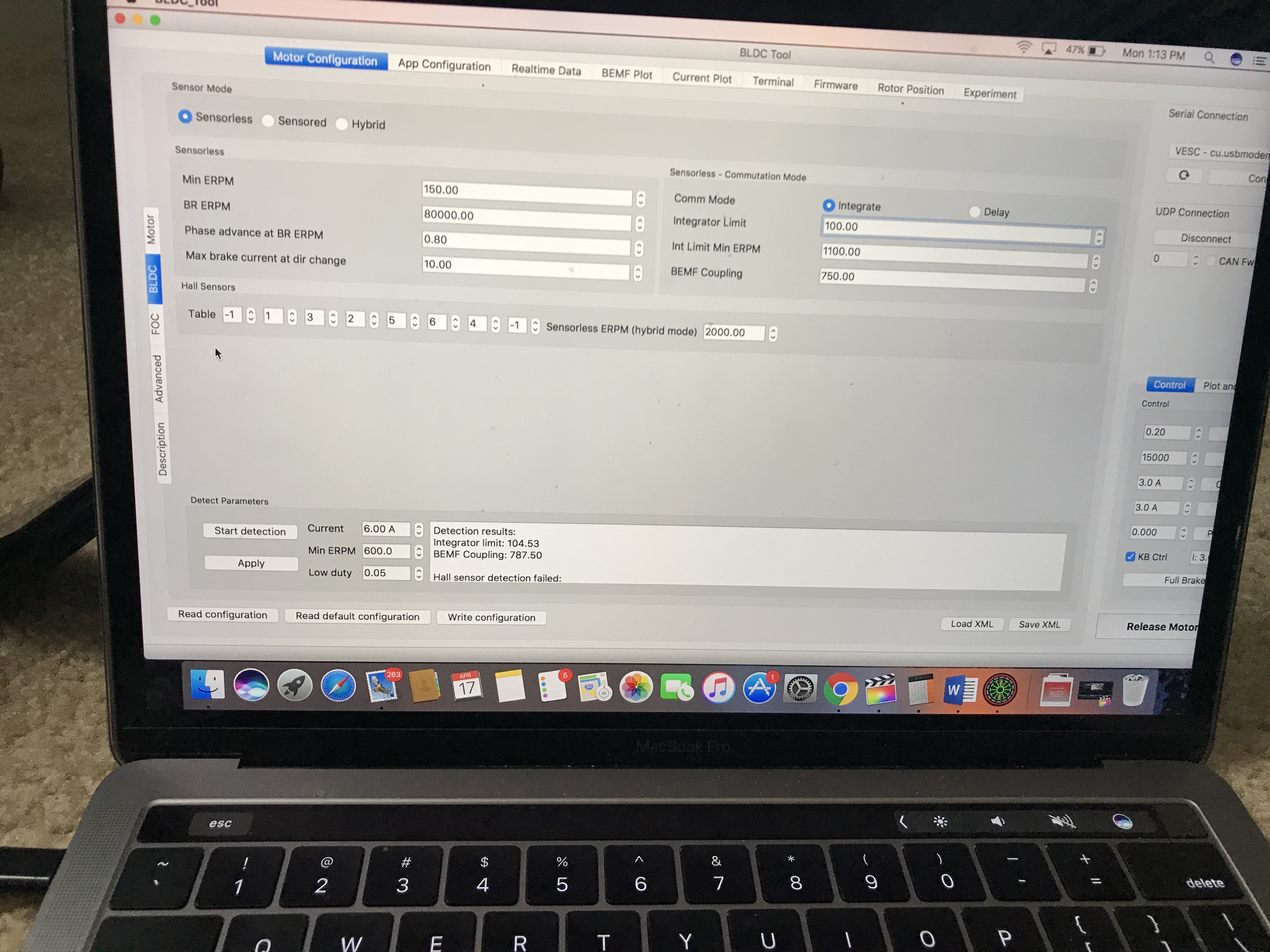
TB VESC BLdC
36t 16t pulley 15mm belt
2.4 ghz nano remote
2x 5s 5000mah batteries in series to make a 10s setup
That remote has known reliability issues I personally wouldn’t risk injury using it. Also your pulsewidth looks a little off, usually it displays percentage and should be exactly in the middle at 50%. Then test failsafe (neutral when connection is lost) is working, turn off the remote and the pulsewidth should stay at exactly 50%, if not you would have to adjust it
Again check your pulsewidth to make sure it’s dead center when controller is on and off. If there is no issue with that then it might be your controller.
Make sure wheel pulley is perfectly centered and you want to ease into brakes as much as you can. Is your motor pulley aluminum or steel?
+1 for controller issues. Pulsewidth looks weird. failsafe likely not setup correctly.
Short term: set your failsafe to neutral instead of full brake - the controller is probably cutting out while riding and “failsafing” to brake.
Long term: Would recommend a GT2B with a 3D printed housing for better reliability. Like the Baby Buffalo and Mad Monkey mods. Both are really good, but I’m starting to like the Buffalo a lot better lately. Less chance of accidentally grabbing a handfull of throttle when you aren’t expecting it.
If your board is on and it has brake on wheels(with remote off) then your failsafe is wrong. You need to fix this with rebinding your remote to receiver.
And when remote dropped connection it brake and threw you off.
If it rolls freely this most likely wont be the issue.
So try check with board on and remote off if it brake while remote is off.
If it’s aluminum it will be really light, if it’s steel it will be heavy. Aluminum brakes down super quick, did you have belt skipping problems when brand new? Steel last longer that’s why I got some custom made and have them for sale, I have 15t
Just try start your board without your remote on, and try and see if it rolls or is keeping full brake.
preferly before you rebind it if so you know that is the issue for sure.
The remote itself is unreliable - Im in the same boat as you when it comes to that. I feel a tad more comfortable with it now that it doesnt full break on disconnect. But Im going for a new controller. Mine disconnects every now and then.
About the belt, do you keep yours loose? I keep mine tight, but not super tight. I can tell that I had some skipping by looking at my pulley. but nothing I’ve noticed. Im 75kgs(165lbs ish?) so not to heavy though.
Mount the truck clamp tight, mount the motor mount tight, mount the motor loose. Then pull the motor as far out you can while pushing down the belt 3/8s of an inch (make a tiny dot with a sharpy) the tighten the motor mount screws.
If you really want to use the Nano remote at least failsave should be in neutral 50%. You can check it on the bench with BLDC Tool. Look at the green (in your case blue) bar (Display on), give throttle - stay - turn off the remote. The green (or blue) bar has to go to neutral 50% - no brake no throttle.
Btw. I can not see the percentage next to the blue bar, is it not visible in the Mac Version of BLDC Tool. You better change to ackmaniacs 2.54 Version, it’s much better.
Beside of the correct pulsewith the nano remote has a throttle trim to adjust the neutral 50%.
I have some mine remotes left in stock. Arguably the most reliable controller on the market, next to the GT2B. It’s small and slides right in your pocket, and you can remove the wheel if you wish. This will fix your issue and give you a lot more confidence when riding.
+1 on rebinding the remote and that remote having intermittent connection issues. I haven’t had issues with it since adding a ferrite ring though. I still use that remote on my 6000w 4wd hub board lol.