Helloo,
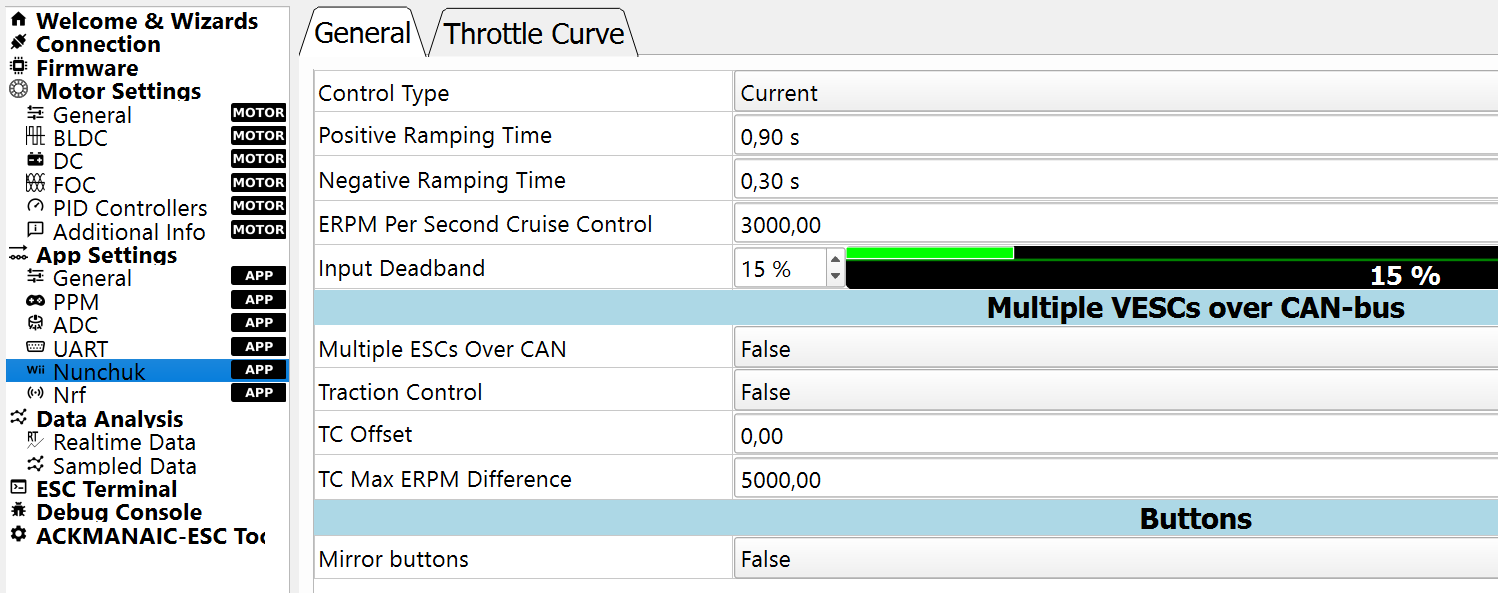
I’ve been using the vesc with ackmaniac 2.54 with BLDC for some time with no problems and really nice behavior in every way. I have a 9s battery with Nyko Kama Nunchuck controller. Now I have configured ackmaniac 3.1 with FOC and it works all good with nice startup behavior and so on. The only problem is that when applying full torque for a couple of seconds and than releasing it, the board keeps on accelerating for a brief moment, even if going from full throttle to full brake, the board keeps accelerating for a brief moment. No need to say that its really scary and unpredictable.
My best guess is that there is something going on with an integral windup in some controller loop as full throttle is applied. If someone could pinpoint me to what settings to play with I would be grateful!
I will try the detection again but I don’t think that’s he problem. I have already tried with ackmaniac 2.54 with Foc, no luck there.
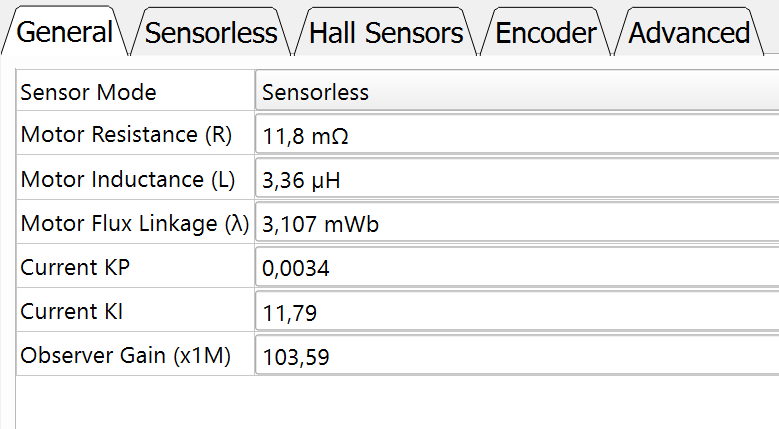
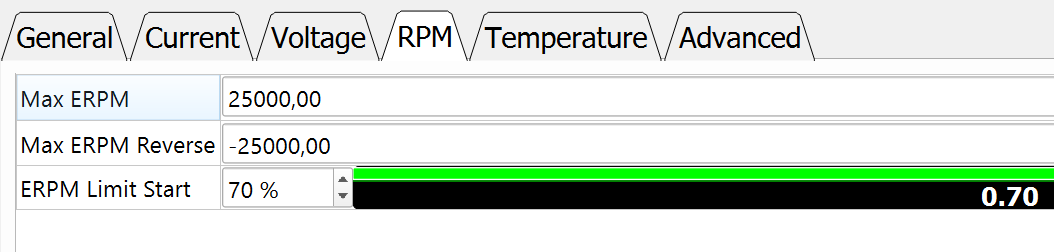
I suspect some integral windup going on in some control loop concerning the requested torque from the esc. However, I don’t know what settings that are affecting this behavior. Maybe I should try changing the maximum duty cycle or maximum erpm or something.
Ive been looking through the code and found something suspicious to me. It seems like a maximum duty cycle of [-1, 1] is hardcoded into the duty cycle control in FOC. Shouldn’t it be like the maximum duty cycle here? In my case thats about 0.4. @Ackmaniac
But i’m having a hard time believing that the remote can cause this repeatable behavior. Especially as it only appears in FOC mode. There are no delay in control signals when connected to the tool.






 Tanks for all input!
Tanks for all input!