Are you going to be selling a 4WD drivetrain? This is the main way to deal with heat imo / divide it across 4 different motors - maybe could put 2000+W to the pavement without exceeding 10A each motor.
4wd and 2wd will be available.
4wd is a divide and conquer technique IMO. You split the current, thus the heat, amongst 4 motors. You don’t have to push them too hard, and thus, they’ll last longer. But if you need or want the extra power, you’ll have it at your finger tip. 4WD is difficult right now due to the cost, it’s a commitment, but I think the price will come down in the near future with the development of new electronics.
It’s an exciting time for the e-skate industry right now!
cost isn’t necessarily a killer (fuck, look at mellow, they’ve sold quite a few 4WD at 3K$$$) but my big concern there is rolling resistance x4.
the most dangerous thing about rolling resistance is when you have confidence in your acceleration and are leaning waaaay into it and you get a split-second controller dropout, turns off the throttle and you almost fall forward off the board.
THEN you get the anxiety of that happening during acceleration haha… add rolling resistance into the mix and its a recipe for trouble
stay low 
The rolling resistance isn’t too bad with my 4wd with the smaller hummie motors. It can be a problem, but I’m pretty calculating about my finger movement on the trigger.
I know the 4wd boards I’m working on will likely be in the $2500 price range. It does cost a lot more to make, but the improved performance is substantial IMO.
Has your acceleration and top speed improved since last we met?
Top speed is about 30 mph right now and the new hall sensors allow me to start from a rolling backwards on a hill. So yes and yes. These are still the same small motors also. When the new motors are done, I might have a board with too much torque.

so if we cut the crap, will a belt driven 6373 setup be better than the raptor 2 up that 30 degree slope? The raptor came down to 6km/h at the end and that is basically close to stop. If the hill was any longer I guess it would have stopped. does the belt system solve this? I’ve only got experience with hubs and mine sucks when hills come by but are OK for most other things other than beeing very rough with only a tiny bit of urethane around the rear wheels ^^
I would say yes just because those hubs are going to eat up way more amps and I don’t care what @onloop has to say about how efficient his hubs are they will still draw more than a single especially up a hill. Prove me wrong and that’s that
Forgive me because most of my education on this topic is coming from this thread (yes, I just read it from start to finish), but don’t you need to show the top view and just how wide your board is to prevent it from breaking at the fulcrum? That’s one of my big takeaways is that the width of the belt is an important part of the equation.
Isn’t a similar comparison a Dodge hellcat with 18% parasitic loss due to the front engine and rear wheel drive transmission and a Tesla 100d and the dual direct drive motors? I much prefer the rumble of the hellcat, but there is no denying that the Tesla has the ability to deliver better performance when it comes to delivering torque to the road.
Intitial startup torque yes but that hellcat will beat it after about 10 seconds, the reason the tesla has better torque on startup is because of electricity moving faster than belts and pistons. And those hubs are going as fast as the electricity/ current reaches them
Does the tesla have hub motors I thought it had a gear. I heard there’s one motor for producing torque and another for regen. And the windings are potted.
@MoeStooge but does that work just adding more poles. They’re now weaker
Short answer, Tesla is not direct drive. Long answer below.
Tesla is using a geared differential. It is not direct drive. My Tesla has a small front motor and a bigger rear motor. Most of the time it’s running from the smaller more efficient front motor but when I floor it putting out 300kW++ it’s using both at the same time. In the winter it’s also using both so my average W/km goes up by a lot compared to when running only the small front motor.
About regen I’m not sure what engine is being used but I think both is used. I’m getting 60-70kW regen when the batteries are warm.
2 Likes
I think the point is that focusing only on loss of energy during transmission while ignoring mechanical advantage is not a really robust way of looking at this. It’s like saying a unicycle is superior to a bike (assuming the same wheel size) for achieving high speeds because there’s too much energy loss in a chain gear reduction and a unicycle has no loss because it is direct drive. This argument ignores that your legs pedal at an optimum rpm and that rpm is much slower than the rpm needed to achieve higher speeds in a bike wheel.
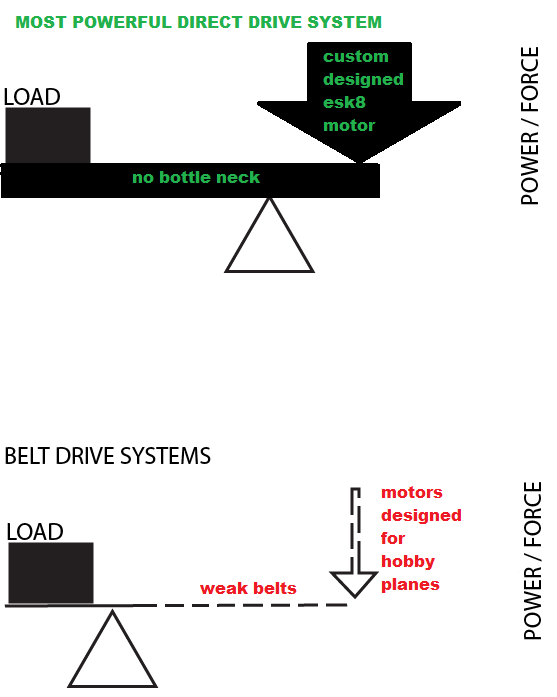
HERE IS ANOTHER GRAPHIC TO HELP YOU ALL UNDERSTAND.
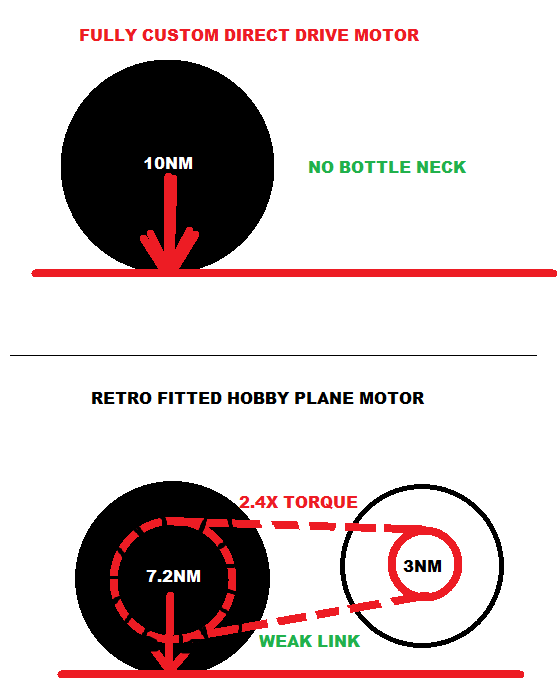
If the belt guys want to compete on performance they can increase the motor torque output (design better motors), but then you reach a torque transfer limit of the belt. the belt is the weak link if you want maximum power at the wheels.
onloop are you drunk ?
10 Likes
At what speed do you achieve 10Nm?
1 Like
Scenario #1: Take an outrunner motor that was initially designed for other applications and then tweak it to be better suited for electric skateboards. Use tried and true methods in belts and pulleys for gear reduction and power transmission and enjoy the ability to put any one of a number of fantastic skateboard wheels on the board. Skate wherever you want.
Scenario #2: Take a similar hub motor that was initially designed for other applications and then tweak it to be better suited for electric skateboards. Stick this (relatively) large, hard object inside a wheel that is designed to contain a hub motor INSTEAD of being designed to be the best wheel for a skateboard. Do your best to overcome the obvious heating issues and inherent inefficiencies as they relate to torque. Find pristine roads and smooth conditions to ride on so that the thin urethane band surrounding the 2 to 4 drive wheels doesn’t rattle your teeth out.
I’m not sure why either of these scenarios would win any awards for innovation and technology. I call this adapting and improving upon what already exists for your specific needs. And there’s no shame in that.
My Harley has a belt and I haven’t had to service it at all. I have other motorcycles, bikes, and e-bikes, with chains, hub motors, and even one with a shaft drive. They all work fine. But they don’t have motors that occupy a HUGE percentage of the wheel’s interior that results in a compromised ride. I have lathes and mills with pulleys and gears but ALL of them have the ability to change the gear ratio. If you can’t physically change the gear ratio, it better be accidentally perfect for whatever application you need it for right out of the box.
As someone who has spent the last 18 years of his life looking to make a skateboarder’s life a little better, I’ve tried a number of different wheel shapes, sizes, and urethanes on a number of different size and shaped cores. For longboards of all lengths and weights, you basically CAN’T HAVE TOO MUCH urethane in your system, but you can very easily have WAY TOO LITTLE. You’ve probably seen a picture of a 101mm Flywheel on a 70mm core or an 83mm or 92mm Flywheel on a 50mm core. There’s a reason that they are in the museum and not on my boards now. Not enough urethane. You NEVER saw the 92mm Flywheel on the 70mm core because I knew that it should never see the light of day. Sasquatch sightings are more more likely.
When, as, and if someone tools up to produce a wide variety of nice PU sleeves with both a good chemical bond AND a mechanical lock for the soft wheel urethane, they’d be part way there. Then they’d have to tool up for many big and expensive wheel molds to put onto those sleeves. Only then could someone design, source, and produce different size hub motors with a variety of different sleeve diameters and sleeve widths to correspond with the variety of hub-motor-wheels. But absent that you’re going to see one or two hub motors in one or two wheels per vendor. Period.
There’s a big challenge in producing a ton of SKUs in a business. I’m the fool who currently makes 21 hanger widths (at 5mm increments from 100mm to 200mm inclusive) and has started making 210mm, 220mm, 230mm, 240mm, and 250mm heXL hangers. The same fool makes 0°, 5°, 10°, 15° 20°, 25° 30°, 35° 40°, 45° 50°, 55° and 60° baseplates. The same fool does many of these in a cast version that are 100% compatible with the CNC/machined parts. Oh, did I mention that we do these hangers rakeless and raked so that they can also be run flipped? Don’t get me started on bushings and wheel and core sizes and shapes because then we’d have to start talking about the rockered, flat, cambered, concave, dropped, drop-through and micro-dropped decks in various lengths and materials. I’ve gone broke doing it, but who the hell else loves skateboarding that much and is that foolish?
I think it’s great to see a number of different approaches at getting people on board electric vehicles. Most of my early contributions will be of the “mechanical” types … wheels, pulleys, trucks, steering and damper systems (more on that later), motor mounts, collars, decks, bearings, and bushings. Although personally reluctant to go the hub-motor route, I’m happy that others are. There isn’t ONE way. And on the the chance that you want to try some bigger wheels with even more urethane and a wider contact patch, pray that I love these 107mm SuperFly’s in 74a Reflex Formula urethane and that a big rich esk8 company can help keep Abec 11 alive because these are just way too f’ing nice to keep to myself …

If your pulley fits any Classic Flywheel, it will fit these new offset 107mm SuperFly’s … Summer 2017, 83mm, 90mm, and 97mm SuperFly’s to follow …
20 Likes