I currently cruise around on a loaded Dervish or Tan Tien with Paris trucks (dropped through) and Otang InHeats and Balut’s respectively. I know the Balut’s were recalled a long time ago, but i just couldn’t bring myself to give them back. I love the flex of these boards and how low they are to the floor and absolutely want to keep these features as a priority.
This will be my first electric board that i am hoping can augment the final leg of my usual commute off the train and on to work or uni. I am on my way in to my third year of Architecture school at the University of Sydney which is a 12 minute walk (1.1km) away from the nearest station. Obviously that isn’t too far at all, i’d also like to get maximum low profile rage to allow longer cruising for recreation.
I have a Shapeoko 3 CNC router and access to a 3D printer, I am hoping to use this project to learn Fusion 360.
I’m just over 6 foot and 100kg’s and there are some fairly steep hills around in Sydney, so i’m going for a dual drive first board. With the desire to keep the drop thru trucks, I am thinking it perhaps best to mount the motors outside the board as opposed the inside/under the board as appears common in the threads i hav trawled through. Any reason mounting outside is not common?
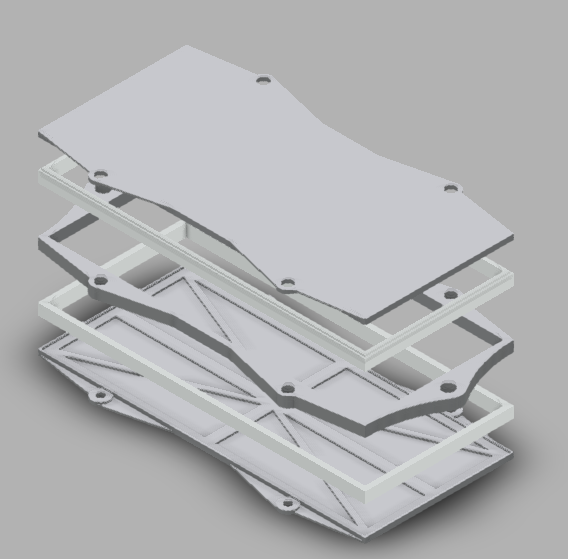
I was thinking of using long but thin thin LiPo batteries with their long side mounted perpendicular to the board. I was thinking of CNCing a fairly tight enclosure for each battery, the battery would be suspended conceptually similar to the way it is done with condenser mics. Each individual battery enclosure would be mounted using a nutsert/bolt/screw at each length wise end of the enclosure’s, they will also be elevated and suspended/offset from the deck with a silicone ring or bush etc. I would also like to suspend metal bash plates over each battery compartment using similar silicone spacers from the front facing wall and bending over the top face. The idea being:
-
Each battery is suspended within it’s own enclosure and dampened for vibration.
-
Each enclosure is somewhat dampened for vibration by small contact mounting points of silicone type material.
-
Aligned horizontal fixed mounting perpendicular to length of board allow length wise flex of board to remain.
-
Nutserts in conjunction with silicone bush type mounting for battery enclosures will facilitate torsional twisting of board.
-
Metal bash plate suspended/cantilevered above battery compartment provides a strong, puncture proof layer of protection for batteries
-
Three layers of separation creates a 'crush’ability - where the combination of bash plate + Air Gap + Enclosure + Airgap may absorb the shock of bottoming out due to low clearance on road surfaces.
Luckily @namasaki has a proven battery and BMS template that get’s me most of the way there. I will be using 5 x ZIPPY Flightmax 8000mAh 2S1P, as they are slightly thinner whilst also proving 60% increase in capacity?
I have ordered a couple FOCboxes and a nano-X remote controller. I will now start on CADing and prototyping some enclosures for batteries, BMS and FOCbox’s and working out elegent wiring, braiding, grommets and stuff like that.
If anyone has any advice on mounting motors in such a tight space, that would be really appreciated. As previously mentioned, i’m thinking mounting the motors outside the wheels as in my head that may provide the best clearance for my drop thru & board requirements. (I am fairly attached to the drop thru) Maybe one motor under and one outside? Maybe it won’t be an issue at all? easy fit? As far as i’ve worked out i’ll need two 190kv motors. Since i have a hobby CNC i suppose it makes sense to have a crack at making my own mounting brackets, i could 3d print the wheel pulley custom for my Balut’s and purchase a belt and motor pulley.
The other cheap and actually really clean possibility is to pickup dual 72mm hub motors and trucks I saw either on eBay or Aliexpress? They seem to have really low kv (75ish?) rated motors for 2s-6s. No clearance issues, no linkages to fail, no major maintenance and probably cheaper overall. I have seen the larger hub motors (90mm), but being as low to the ground as possible is important to me. I am a pretty heavy guy, plus my gear and fairly steep hills, i’m looking for max torque and range, speed is a very distant third requirement.



 [Balut’s were recalled a few years ago, but I keep them around, because i’m a rebel and they look so damn good.]
[Balut’s were recalled a few years ago, but I keep them around, because i’m a rebel and they look so damn good.]







 The bottom of my mount is what I was comparing to a 4 bolt main cap off an decent V8.
The bottom of my mount is what I was comparing to a 4 bolt main cap off an decent V8. Top down view of the motor mount.
Top down view of the motor mount. I am fairly happy with the clearance beneath the board. I’ve lost perhaps 30mm of clearance under the dek at stock drop thru height. You can see the Hall sensors up in the air there, still waiting on some JST plugs so i can connect these up to the focboxes. Why i purchased white shrink wrap is completely beyond me, that sh*t is ugly AF!
I am fairly happy with the clearance beneath the board. I’ve lost perhaps 30mm of clearance under the dek at stock drop thru height. You can see the Hall sensors up in the air there, still waiting on some JST plugs so i can connect these up to the focboxes. Why i purchased white shrink wrap is completely beyond me, that sh*t is ugly AF! The shape of the board means the end modules protrude from under the deck slightly, which became the spot I placed my charging port and on/off switch. Perhaps i should find some sort of cap to keep it free of debris. the sides of the modules are cut out of ikea chopping boards. You see the focbox, bluetooth and nano x receiver LED indicator lights blinking through which is a nice piece of user feedback when powering the board on.
The shape of the board means the end modules protrude from under the deck slightly, which became the spot I placed my charging port and on/off switch. Perhaps i should find some sort of cap to keep it free of debris. the sides of the modules are cut out of ikea chopping boards. You see the focbox, bluetooth and nano x receiver LED indicator lights blinking through which is a nice piece of user feedback when powering the board on. My enclosures have taken up pretty much the whole length and width of the board, which makes it kind of awkward to handle from the side with the bolts sticking out and nowhere to mount some kind of side carry handle. I will have to cut those bolts down and have been considering an overlapping outer layer of some kind.
I am also tall enough that i can’t drag the board next to me holding the motor truck without the other kicktail hitting the ground.
My enclosures have taken up pretty much the whole length and width of the board, which makes it kind of awkward to handle from the side with the bolts sticking out and nowhere to mount some kind of side carry handle. I will have to cut those bolts down and have been considering an overlapping outer layer of some kind.
I am also tall enough that i can’t drag the board next to me holding the motor truck without the other kicktail hitting the ground. You can see the gap between each module and the deck in this picture. My enclosures are definitely not water resistant at all. They are bolted down pretty tight and I could have sealed them all up nicely. I could have sleeved the cables and run them through grommets or at least caulked up the holes, but i didn’t in a rush to get it done.
You can see the gap between each module and the deck in this picture. My enclosures are definitely not water resistant at all. They are bolted down pretty tight and I could have sealed them all up nicely. I could have sleeved the cables and run them through grommets or at least caulked up the holes, but i didn’t in a rush to get it done. Topside view of the insert holes. There is one bolt which sticks out of the board because i accidentally picked up the wrong length bolt and didn’t realise until i had already bolted down that module. It was such as massive pain to bolt these modules together that i don’t even want to think about taking it apart to change it. I was forcing a pliers between the nut and enclosure on to the bolt to stop it from spinning, whilst i used a spanner on the bolt to tighten it down enough to expose the bolt past the nut. Then i was holding the top of the bolt with pliers which using the other hand to use a spanner on the nut. 10 x per module, x 7 modules.
Topside view of the insert holes. There is one bolt which sticks out of the board because i accidentally picked up the wrong length bolt and didn’t realise until i had already bolted down that module. It was such as massive pain to bolt these modules together that i don’t even want to think about taking it apart to change it. I was forcing a pliers between the nut and enclosure on to the bolt to stop it from spinning, whilst i used a spanner on the bolt to tighten it down enough to expose the bolt past the nut. Then i was holding the top of the bolt with pliers which using the other hand to use a spanner on the nut. 10 x per module, x 7 modules.
 They are a centre set wheel, so may end up with fairly long/wide pulley which may necessitate using long shaft hangars like torqueboards 218 and bearings within the pulley itself.
They are a centre set wheel, so may end up with fairly long/wide pulley which may necessitate using long shaft hangars like torqueboards 218 and bearings within the pulley itself.

 Basically went up and over a steep hill, tried to punch it over the top and didn’t really get the usual top speed for around 200m. 200ish metres after that it was cutting out. Stopped and pulled my phone out to this and a supposedly flat battery.
Basically went up and over a steep hill, tried to punch it over the top and didn’t really get the usual top speed for around 200m. 200ish metres after that it was cutting out. Stopped and pulled my phone out to this and a supposedly flat battery. boosted has been using them for years now.
boosted has been using them for years now.