Hi All,
I am having trouble “taming” my new build with 12S4P and 6369 200kv motors. The board has a tendency to throw you off the back if you accelerate too quickly. Maybe I shouldn’t have named it “Hellboy.”
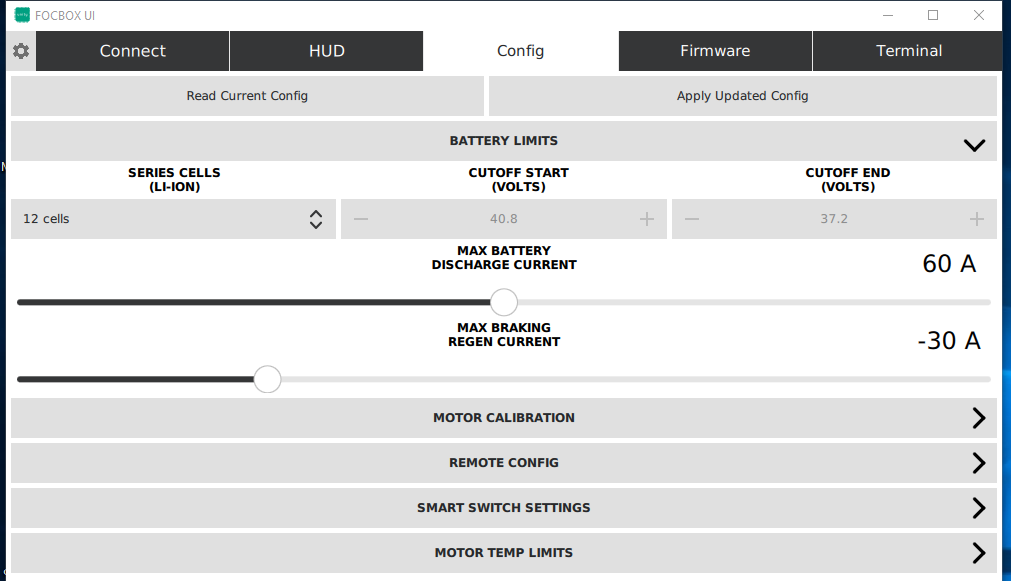
I have fooled around with throttle curves, but also read the post from @trampa carefully when he discusses PPM and Motor / Battery Max / Regen. Currently I am at the default FOCBOX Unity settings of 60 and 30 amps,
Is there a different setting I should try? I need a better understand of what the current settings do and what baseline / best practices are helpful setting up Unity for a custom board.
Thanks in advance
Just getting real simple, what remote are you using, does the throttle have enough throw for you to smooth it out with your finger?
Your setup is relatively beefy, I think most of us just learned to not fall with the power! Probably not ideal
I am using the Hoyt Puck for the remote. I would say it is very sensitive. I am an experienced skater, but for example, yesterday I was going slowly and maybe jiggled the remote wheel a little and wham – on my back. The board can do this at high speed too, although I am more diligent there.
Isn’t there suppose to be 3 different mode on this remote?
Yeah I’d put the puck up there with the better ones based on reviews here.
Just increase the ramping time in the ppm section.
Few ways to tweak your settings,
opinion 1:
lower your current settings. ex: try motor max 50 min -50, batt max 40 min -20
opinion 2:
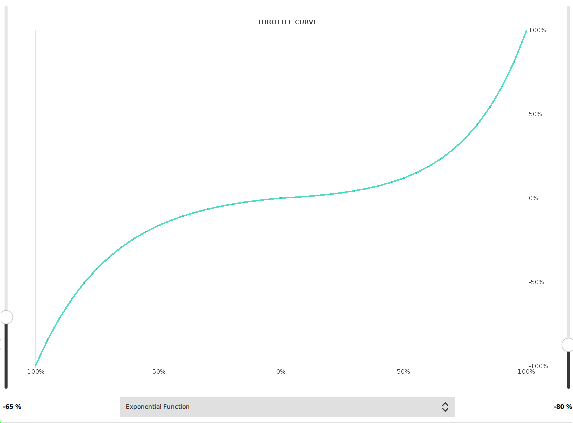
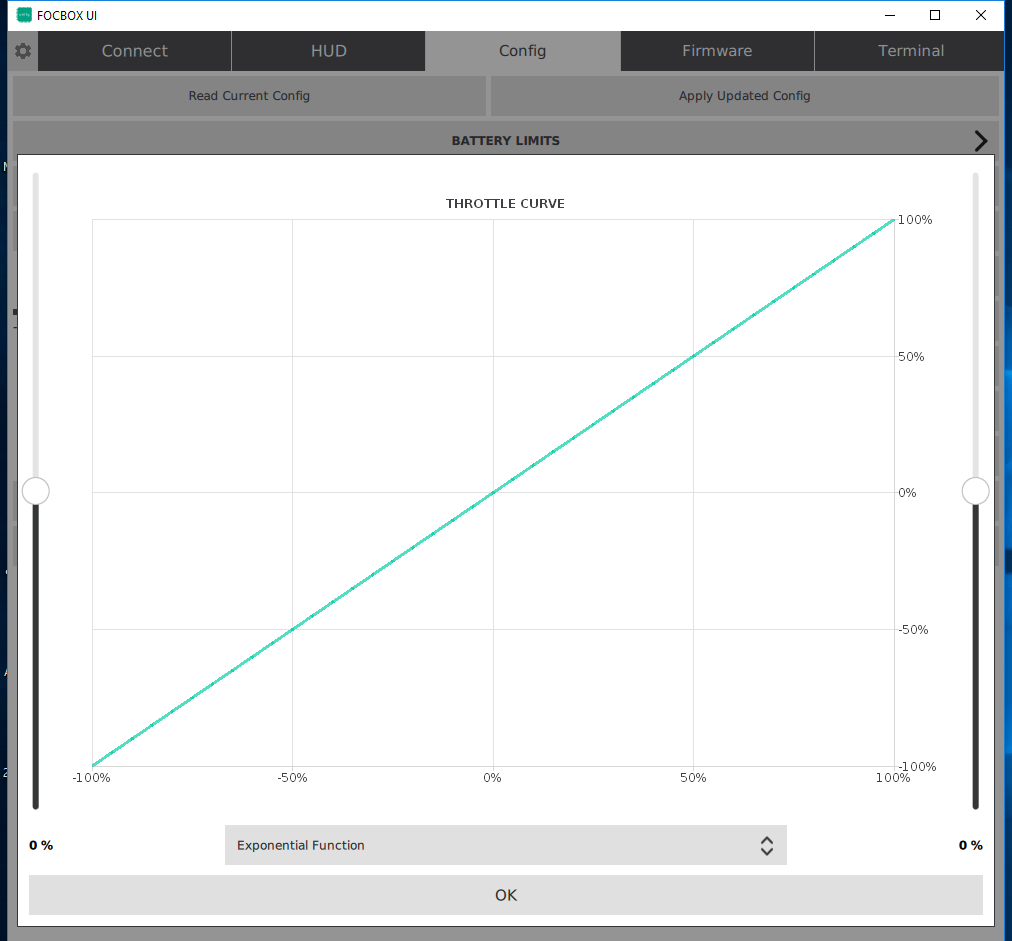
play with the throttle curve, smooth out the lower portion of the ppm curve with the exponential curve
example:
@johnnyMeduse yes, there are 3 modes, I have been trying that, I tend to end up in mode 3 (fastest) because of hills…
@blasto I will try option 1 fur sure. I wish I had detailed explanations on what those terms mean exactly. For example, where is / what is the PPM section?
On the throttle curve, the suggested curve above seems to push the acceleration problem into faster speeds. Instead of an explosion at 5 miles per hour, now I get one at 20. I think this is what Frank meant by saying the power curve was of limited usefulness.
Keep in mind the throttle curves input is amount of throttle not speed. But yeah I like to keep mine at -10 %, -10%.
You ran the remote config→calibration in the setup to get min and Max for your remote when it was in the fastest mode? This might be your problem I have tested a hoyt remote here and the timing of it was a bit strange. I’ll be adding some more notes/steps to guided setup with the next release to explain more things quickly without walls of long text.
If you ran min/max calibration in a slow mode with the remote it could definitely mess up your sensitivity.
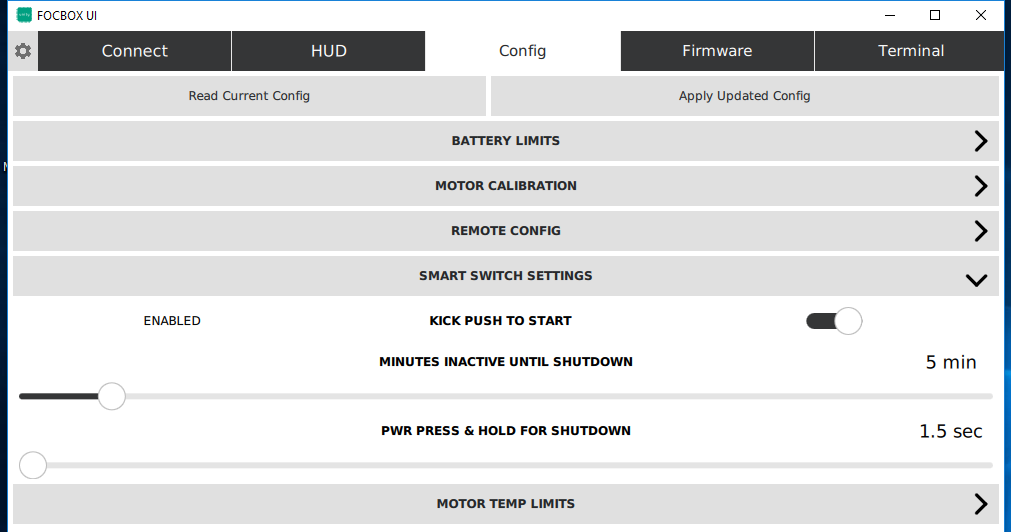
Under the motor temp limits tab in the Unity app. What is the motor beta slider for? Thanks!
If your motor has a thermistor in it for measuring temperature then beta is just a property of that thermistor. See here:
If your motors don’t have a sixth wire coming out of them plugging into the Hall port don’t worry about it. If they do and you don’t know the beta value contact your supplier. If they don’t know you can stay with the default beta value, disable motor temp throttling, or run some experiments to determine beta on your own
Hera are my current settings. Also the motor has 6 wires, this one here: https://psychotiller.com/product/sensored-6365-200kv-motor
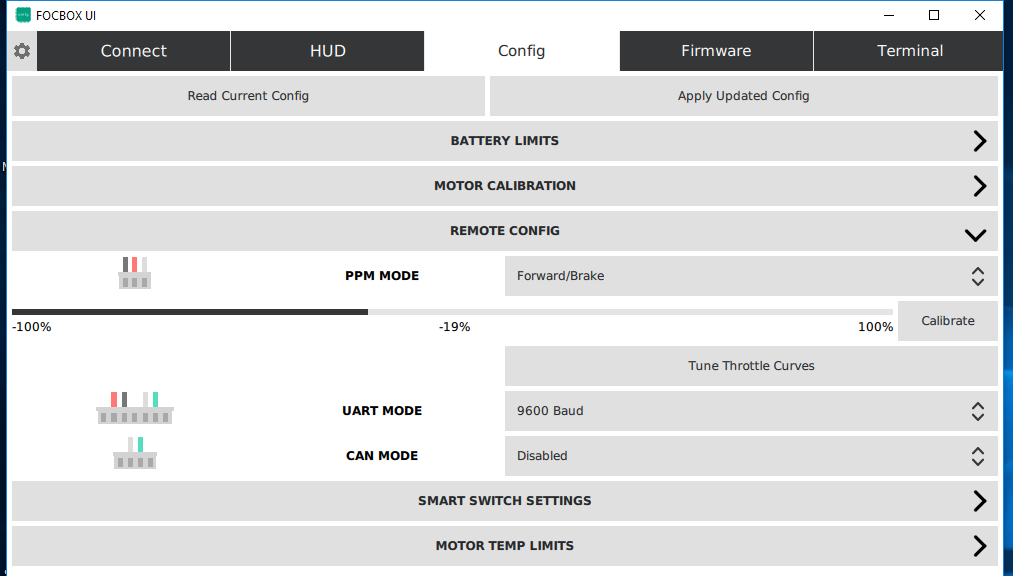


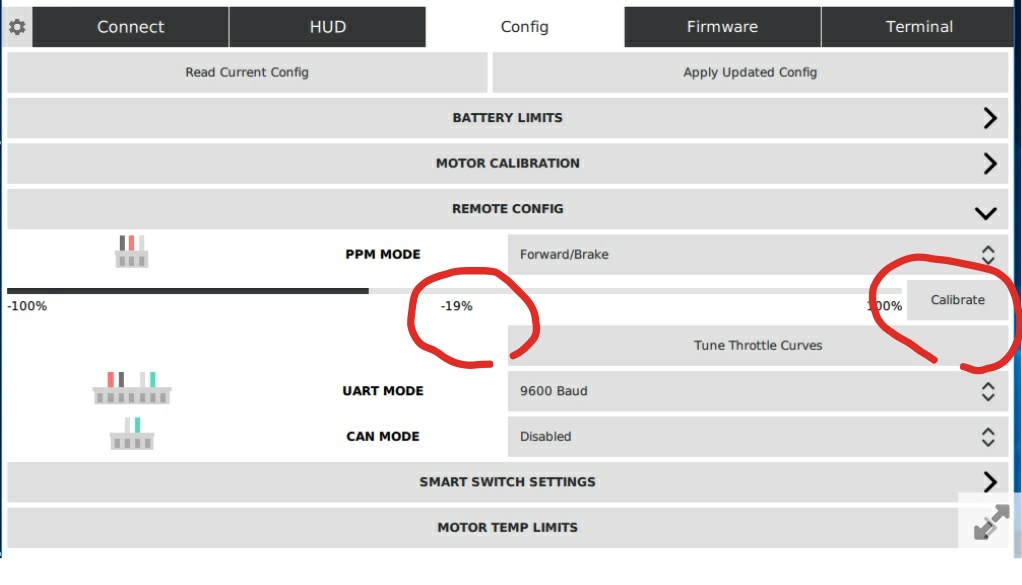
Are you touching your remote here? It’s reading out -19% for some reason which is strange. I’d re-run the calibrate routine making sure it’s in the highest speed mode. A screenshot of that submenu would be helpful too if you are still having issues.
Yep. Talking to Hoyt about that. They are wondering if it is old firmware.
One of those four buttons on it is a little Trim pot I think. Could try twisting that maybe? Probably shouldn’t mess with their debugging process I guess  .
.
I’ll see if I can find a window of time to fiddle with my hoytt (@Blasto 's remote that I stole in vegas) today and see what I find.
I assume the beta value is listed on the spec sheet for the thermistor. I have a couple TB 6374 190kv. I will take the bell off later to see what thermistor they use if some quick googling fails to give results.
I doubt a visual inspection will yield much. Maybe try asking the guys at torque boards they should know. @Lunasi any idea what the beta value of TB 6374 motors thermistors are?
Ah yes there’s a trim on the hoyts remote, it’s the bottom right button, it’s a little rocker switch.
@billappleton try to trim up the signal by pressing the trim button up, you want to get the idle position to 0%
Do it while connected to the tool, you will see the graph move
Hi @Blasto, I had the same thought, but the Trim button on the remote does NOT change the -19% number, going up or down either way.
Response from Hoyt: "I’m not familiar with the FOCBOX Unity user interface so I’m uncertain if it’ll work the same way as a Vesc Tool. The following process is how to set up the Hoyt RC with Vesc Tool. Not sure if this sheds light on what may be happening in your situation.
The Vesc Tool has a set up wizard for the remote control. Set the RC on Mode 2 and then go through the set up wizard. Don’t need to adjust or tweak anything. Modes 1-3 were calibrated in the RC firmware based on VESC default settings so no further calibration is required.
There will be (should be) no braking when the throttle is not engaged."
Should I calibrate on Mode 2 for Unity? Is the trim working / not working?