I’ll be periodically updating this thread on my build progress. Here’s a list of all parts I currently have:
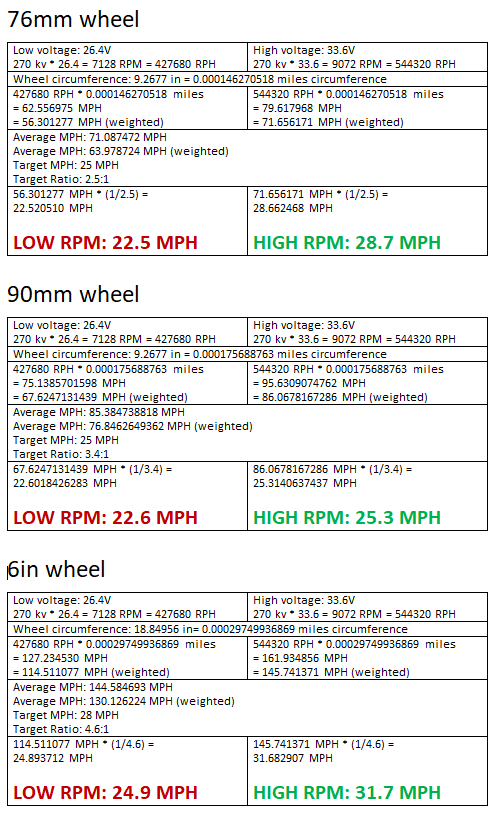
Paris V2 Trucks x2 Focbox x2 APS 270 KV x2 CustomSkateboards.com deck DIYEboard airless tires 76mm road hawgs
Parts to aquire: Lipo cells x24 (8 for pack #1, 16 for pack #12s Motor brackets undecided size of middle wheel (100 ish mm. Not MBS) 3D printed enclosures Custom PCB’s and components
This board is going to be fully waterproof. Currently, I have solutions to many issues:
Motors have had internal bearings replaced with sealed ceramic equivalents. Stator will have thermally conductive high temp conformal coating. Outer bearing has an additional rubber gasket seal fitted into the motor mount, and will be greased between the seal and the bearing.
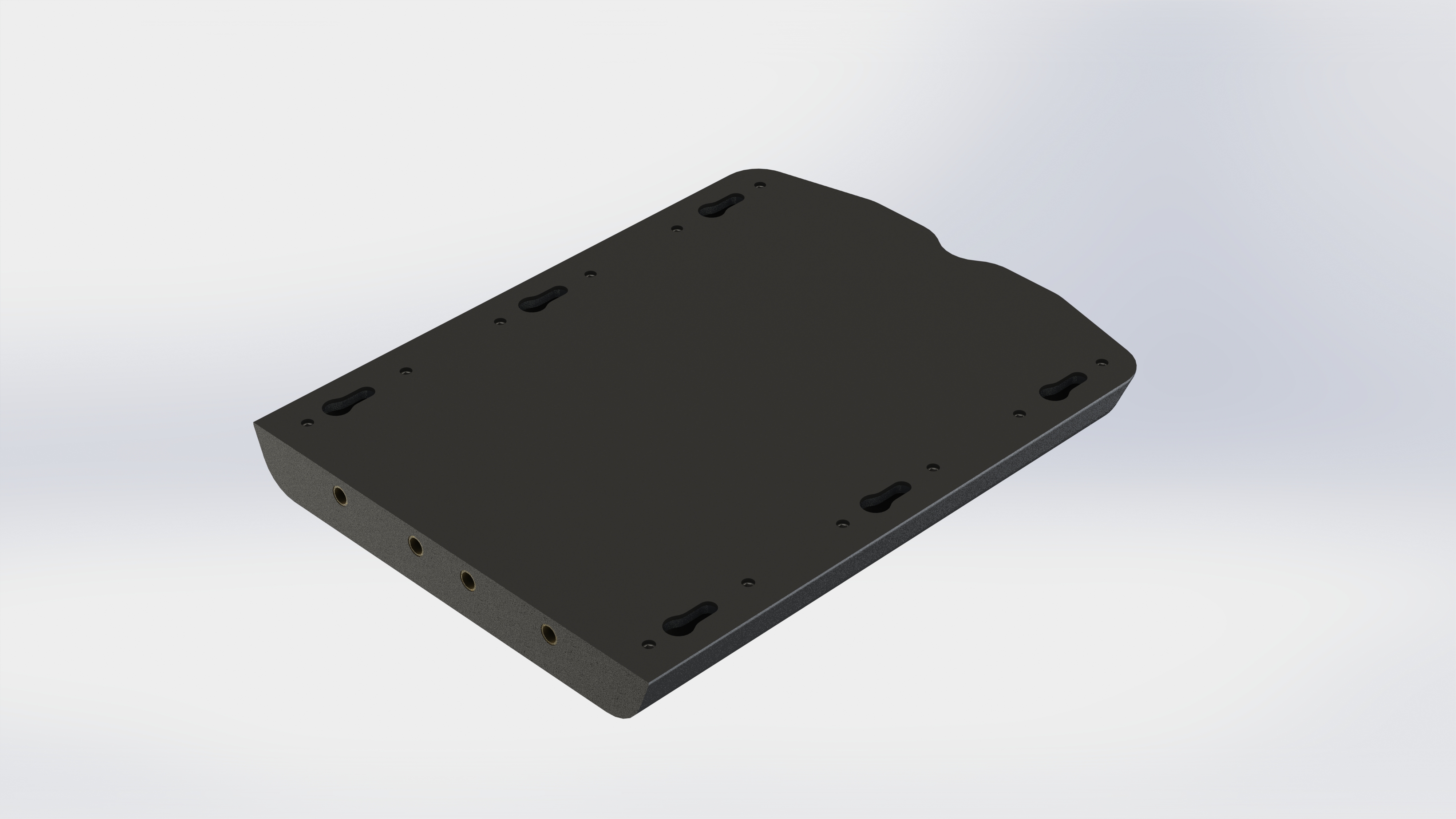
Battery case will be entirely gasket sealed shut. quick connect contacts will have a soft rubber seal to engage with the docking port on the board. The docking port will be bolted tightly to the deck using inset T nuts from the top, with a seal between. Power and signal wires to the battery will be hidden underneath the griptape in grooves. Grooves will be sealed with silicone once completed, then covered with kapton tape and then griptape over top.
Motor wires will plug into contacts inset into the deck. Heatshrink with internal contact glue will completely waterproof these connections.
Phase wires going from the ESC’s will go through the deck, and be sealed from above. Will have quick connects internal to the case to allow you to remove the case.
All wheel bearings will be ceramic sealed Zealous. Larger bearings for the pulleys for the two smaller sized wheels will be sealed ceramic.
And finally, the main control box will be sealed against the deck from below using silicone gaskets and T nuts. There is only one exposed button on this board, and that is the power button. I’ve found a fully waterproof LED button for this.
In addition, it’s using all anodized aluminum or 316 stainless steel, which is rust proof to even salt water.
By the end this board will be able to be thrown into a pool and still drive around on the bottom, and I’m not going to stop until it can do that.
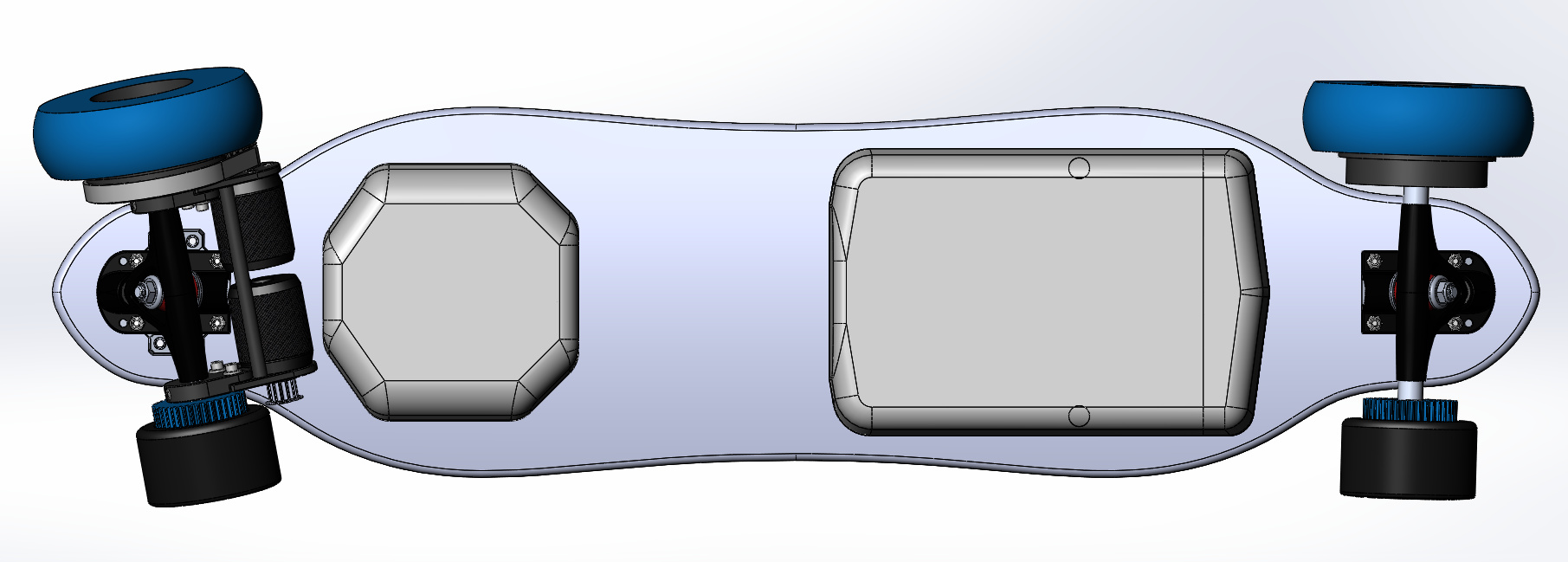
Here is a preliminary design CAD. The trucks are moved to the limit before wheel bite on the 6 inch wheels. Using 5 degree risers with 180mm trucks.
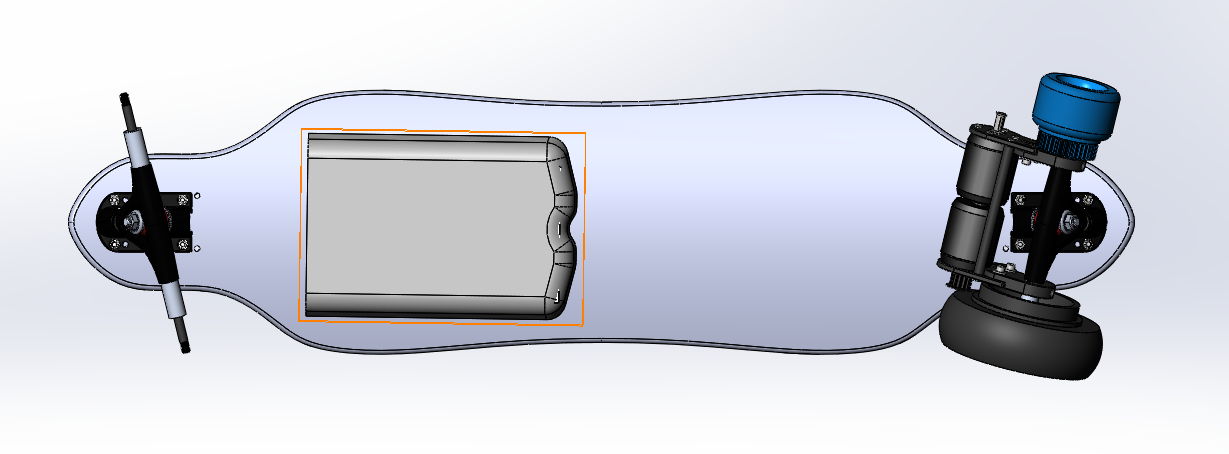
And a side profile.

Here’s the front at full tilt.

Here’s a closeup of the motor brackets.

Now I’ll talk a little about the custom electronics I’m creating (almost done with laying it all out  ).
).
Board side: Uart control of FOCbox, will read data from port
Relay controlling switching of antispark, allows for momentary switch for starting and stopping the board.
Control of underglow, headlights, and turn signals
Smart emergency stopping and unexpected disconnect control
SPI based high power NRF module for two way communication, using data encryption and packet verification
USB mini for programming / debugging
Battery pack has integrated antispark (exposed contacts are not live once the pack is disconnected) and a BMS for charge and discharge.
Remote side:
Haal effect based thumb stick control
cruise control button
turn signal buttons
Headlights / taillights switch
under glow cycling button
Digital display (can display ESC faults, temps, battery level, expected range, current trip distance etc. Contingent on software development.)
USB mini for charging, and flashing new firmware
In conclusion:
This is by far my most challenging build yet, but I’m up for it. My first build used custom mounts and custom electronics for the battery, controller, and receiver. My second build was similar.
Hopefully my third build will be enough for me, using FOCboxes as the only COTS parts. Having all my wants such as swappable batteries and wheel sizes is a must for this build.
I hope you all enjoy watching this long process of me building and machining this board as much as I will creating it. I’ll update when progress is made.





 But it’ll be lightweight.
But it’ll be lightweight.