2 VERY DANGEROUS ISSUES! When I squeeze trigger, the motor starts rolling upto full speed, and when squeezed to the max, the motor dies out. WHEN I SHUTT CONTROLLER POWER OFF, THE MOTOR STARTS GOING FULL SPEED, VERY DANGEROUS if still standing on Eboard. PLEASE HELP, DONT KNOW WHATS CAUSING THIS. I tried rebinding controller, but that didnt work.
What kind of ESC are you using… have you configured it?
Are you using a boat, helecopter or airplane esc? Other issue is your failsafe needs to be set to coast.



vesc is 4.12 running 2.18 firmware
Watch the display as you pull the throttle up to full or as you disconnect the controller and see what pulse width it’s actually reading in those scenarios can see if it’s the controller/receiver not doing the right thing in the display, if it’s the VESC doing something weird it will behave how you want in terms of the display (only go up when you pull the trigger, go to idle when you disconnect).
You can set the control to disabled while you’re testing the input to avoid revving the motor all over too.
1 Like
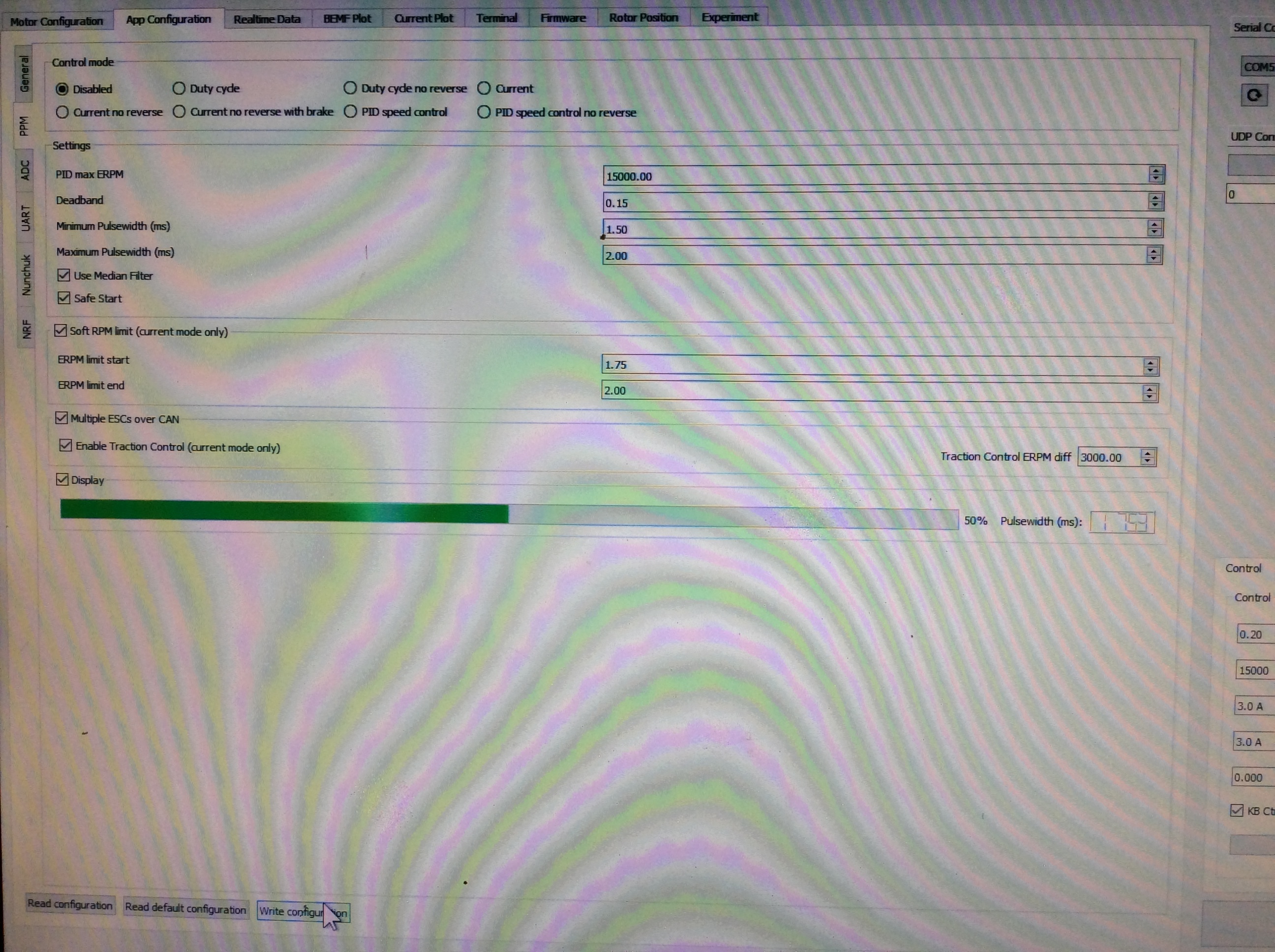
When controller disabled, the pulsewidth goes to 2.0 at full squeezed trigger, heres pics, enlarge pics so you can see settings

How do I set failsafe to coast?
Uh why is your eRPM limit start/end 1.75/2.00? It’s asking for eRPM not pulsewidth signal.
1 Like
The time out in the app configuration should make it go idle in 1 second (1000ms) if no signal for control is received. So it seems the receiver is sending something but the wrong thing or there’s some other error in the config possible the erpm values but don’t think I have that limit enabled (I have a pretty low kv motor so didn’t mess with that)
@Jinra ah, ha, didnt noticed that, i input 0.00 to both, controller stopped acting crazy when i shutt it off now. Thank you,
How do i set the failsafe to coast?
I’m not sure 0 is a good value either. I would uncheck the option if you dont need it or dont know what it does.
See my response above, looks like you already have it set, can test by throttling up a small amount and disconnecting. It should coast to a stop. The failsafe on the VESC side should be good, but make sure your receiver doesn’t have some other failsafe config for if it loses connection to the transmitter for whatever reason and you should be fine.
This is my sons eboard, a little scared he gonna get hurt. I’ll ask psycotiller, thank you for catching that for me.
Ok, i fixed the values to 0.00 in the soft erpm limits, thats one issue fix, how do i set failsafe to coast? thank you for your help.
Sounds like the parameters aren’t set up correctly and you don’t have a big enough dead zone.
Squeeze the trigger in ‘disabled’ mode and note the value in the display box, place that value in the max field. Put on full brakes and note that value, put that in the min field, then try it out. If it’s still cutting out and/or running when back in the middle then increase the dead zone.
OH, it turns out that when I walked away before, my son accidently hit the keyboard from my computer while it was connected to bldc tool, it probably changed settings by accident when he picked it up from floor and he says he pushed some buttons when picking it up from floor, SMH.
its not cutting out nomore, soft ERPM values were wrong, i changed them to 0.00. How can i set fail safe to coast?
Yea, i know that part, how can i setup failsafe to coast?
its working now, but, how do i setup failsafe to coast?