Hi! My name is Gunnar and I’m from the Netherlands. I am a student in Computer Science, Mediatechnology and live in Leiden. I am currently graduating at Servoy, a software company in Amsterdam.
This is my first eboard build, but I have done some hand work in the past. I build my own electric guitar in somewhat the same way as with this eboard, scrapping all parts from everywhere. Here is a pic (the white one):

In case you are interested in that build, you can look it up here:
Anyways, the eboard build! IF YOU HAVE ANY TIPS, FEEL FREE TO LEAVE THEM BELOW! I created an Instagram account to document the whole build, but this forum is obviously more suited to go more in-depth. I will keep posting pics to that account https://www.instagram.com/gunnarkelders/
Parts list
I got almost all the parts needed, except for the battery enclosure made by @bigben. Which should arrive tomorrow. I ordered a lot of stuff from eskating.eu @fottaz is very helpful and an awesome guy to talk to. From his webshop I ordered:
- Motor 6374 sealed & sensored
- VESC
- Remote control, nano
- Bluetooth module
The deck I ordered from blankskateboards.nl It’s four layers of maple sandwiched between two layers of bamboo. Although blankskateboards told me it was a stiff board, It was a very flexy imho (and probably yours as well).

FYI; In this picture I jumped on the board 
So yeah, note to self; don’t flex the board like this with all the equipment installed
From sickboards.nl I ordered the following Caliber 2 10s 50 trucks Orangatang wheels Zealous bearings
Angled risers from skateshop in Leiden called Juhroen
Braided copper wire from Conrad.nl https://www.conrad.nl/nl/kabeltronik-koperdraad-geweven-band-486090.html
The mount I got from @WSB The VESC enclosure from @Crossfire . Pulleys (17mm) and belts (15mm) from @Idea
From Hobbyking I ordered: 5x 2s 40c Zippys BMS extension wires (used none of it) JST-XH 2S WIRE 20cm 1m 10AWG black silicon wire 1m 10AWG red silicon wire
- More parts will be added later
The build itself
- 18-09-2017
I filed the truck to fit my pulley and motor mount. It took a very long time to make this perfect and I still didn’t get it right. The belt wants to move over to one side of the motorpulley where it gets stuck on the side. I tried filing the truck because it was a bit misaligned, but after I got this right it still wanted to touch the side of the motorpulley. The mount bracket is straight so that is not the culprit. This will probably mean the belt won’t have the servicelife it was intended for but I can’t seem to get it right.
Anyways, I installed the mount with blue loctite and adjusted the angle so the motor won’t touch the deck.
The only image I have of altering the motor mount and truck. I don’t have any photos of the truck, but I filed the top flat part of it to remove the slight arch that the truck has towards the middle.

Finally some drilling… Bottom view. The center two holes are 3cm apart and the two holes surrounding them are 1.5cm distanced. I might drill two extra holes for a third wire, but I don’t think that is really necessary. What do you think?

Top view. I used a circular file to carve the sharp edges off since the battery wires will run through there to the nose of the board. I don’t want to have sharp edges which could cause breaks in the copper braided wire

And so this is how it is standing in my apartment right now

- 13-10-2017
Yesterday evening I got around to finally start soldering the batteries together. Including the BMS wiring.
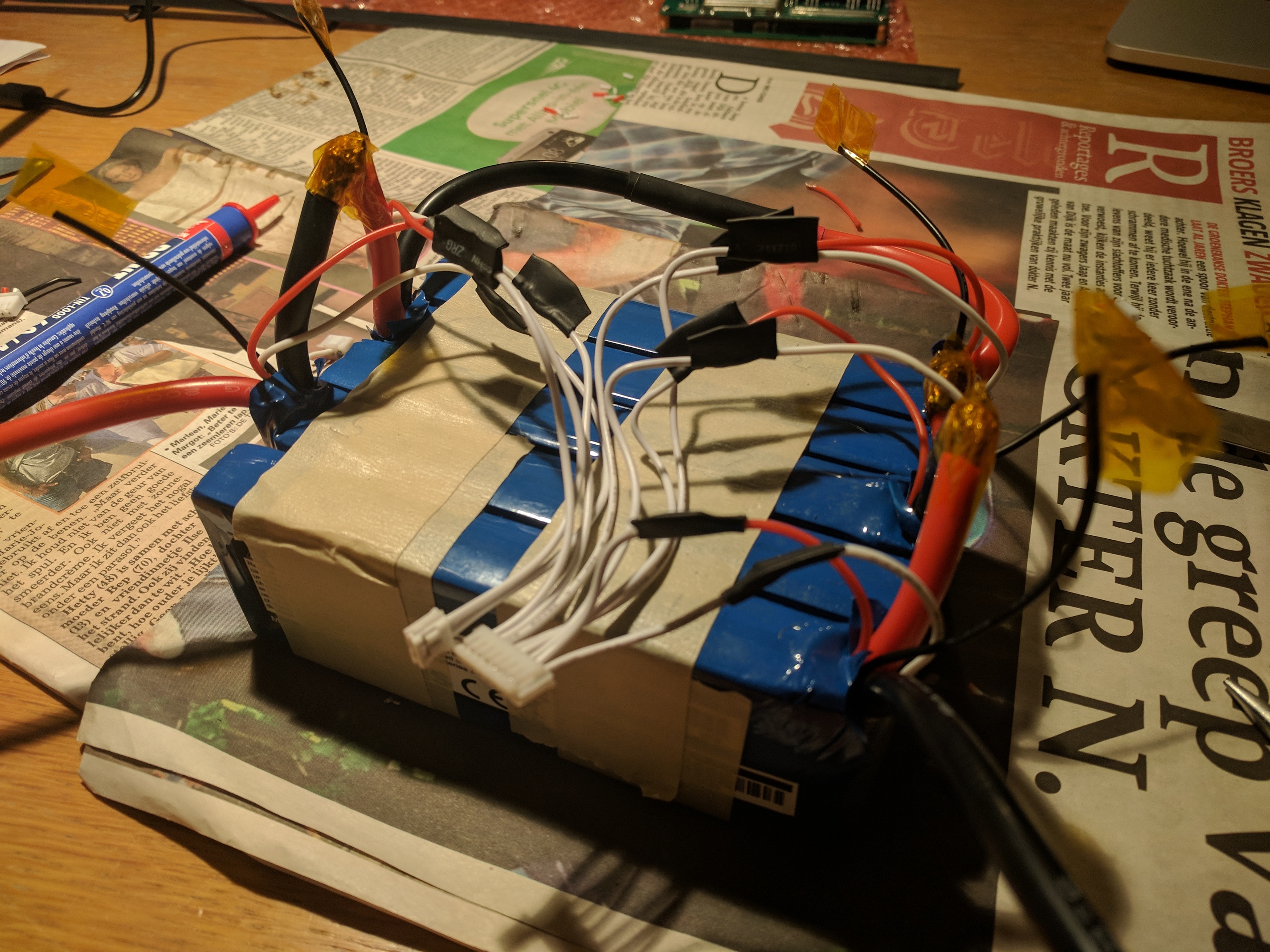
At one time I tried cutting the red and white BMS wires at te same time and they shorted. Hope that won’t be any problem for their life expectancy? I don’t have a multimeter so I was not able to check the voltage of all cells, but I did have some LEDs with which I could test at least that the cells are not dead… (; Might be a good idea to rent one at the shop across my place.
- 16-10-2017
Yesterday I prepared the battery enclosure for the external hardware; the on/off switch, percentage display and charging port. And I discovered two things:
- the on/off switch was not a switch, but a button. My fault for my bad german (; (bought from amazon.de)
- the charging port does not make complete contact. the pin does, but the outer shell does not.
So I need to order another button and have in the meantime a large gaping hole that I need to cover up. Any ideas on a temporary cheap on/off mechanism? The chargingport I tried to narrow the outer shell with tin, but this was a bad idea to start with. the tin would not stick to the metal. After some fooling around I found out that the outer parts of the chargingport worked as a ground, meaning; I have a circuit! So I just soldered my negative lead to the outside of the chargingport.


This evening I finished drilling the holes in the deck to desired width of 9mm. That is the width needed for the insert nuts and from there on I also used it for the bridge wiring to run through. The insert nuts I first inserted by hand but this didn’t go very well. Since I twist my hand when turning with force they weren’t completely aligned to the deck. For the vesc enclosure I used a drill to slowly insert them, this worked flawlessly!


Then it was time to install the bridge wiring for the two enclosures! This was a fairly easy process using kapton tape and a paper towel to rub the tape down over the copper wire. A nice little animation

And this is how it is standing across my apartment right now!

- 22-10-2017
Yes guys! Today I completed the build as far as I could go! I have 2 problems of which one I discovered this evening:
- The aforementioned on/off switch being a on/(on) ‘switch’
- The battery indicator LCD does not turn of in the way I wired it to the BMS and positive battery connector
No real problems I thought as I wanted to complete most of the build so I could test it tomorrow. I will discuss the problems down in the replies of this page so definitely check it out!
So the build is almost complete. I rode it just now across the hallway in my flat since it’s raining outside. Damnn this thing is really powerfull! I set the VESC settings for Motor max and Motor min at 30A and it is still too damn powerfull!!  Not complaining of course but just really baffled about that ‘little’ motor pushing me forward.
I do immediately understand the pros of having a dual drive eskate. The rear truck turns to the left causing the board to wiggle a bit. It is easy to compensate but you shouldn’t have to in an ideal case (and infinite money).
Not complaining of course but just really baffled about that ‘little’ motor pushing me forward.
I do immediately understand the pros of having a dual drive eskate. The rear truck turns to the left causing the board to wiggle a bit. It is easy to compensate but you shouldn’t have to in an ideal case (and infinite money).
Oh well, here some info about the process of finishing the build:
First up was the battery pack. Almost all the components were installed for a test but then I discovered that the switch was a button and not a switch. So I had to come up with a temporary solution for the time being. My solution was to use the cut-off ends from the lipo batteries as a connector:

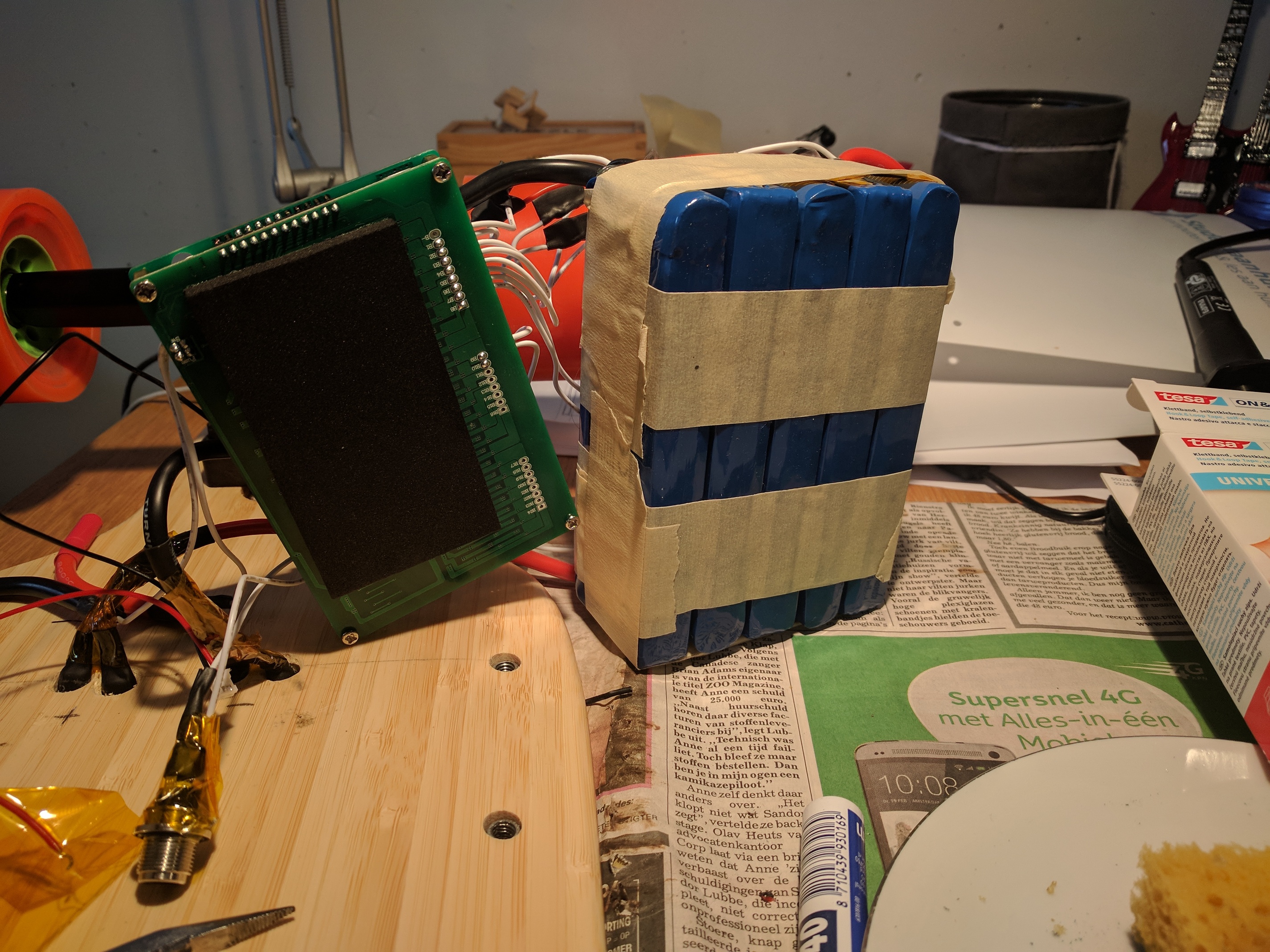
From there on i checked the battery system and it all seemed to work fine. Strangely when turning off the system the battery indicator’s backlight turned off as expected but the lettering on the display stayed on, displaying 0%. The only way to turn it off was by disconnecting it briefly, afterwards I can connect it again but it won’t turn back on until I turn on the whole battery system. An issue for later I thought, first let me try to charge the battery for the first time…
Before I did that I glued the battery indicator to the battery enclosure with hotglue, because I want to make testing harder on myself (; Anyway; SUCCES!! It charged completely fine up to 100%.

From my calculations the battery should be charged in like 5 hours. Charging the 10S (5x 2S 5000mAh 40c) at 3A, that is.
Next challenge, soldering the bridge wires together. This was somewhat a pain in the ass. My 30W soldering iron made it fine, but forcing the wires to cross each other and solder 3 wires together wasn’t a joyfull task. Eventually I succeeded

The extra black and red wire is to compensate for the length I need when I will detach the battery enclosure from the board for inspection or whatever. Just to make life easier I did the same for the VESC
Then I slapped some velcro tape to the battery and enclosure to attach them together (bought at Gamma). From my guitar build I had some leftover foam. It had one corner cut out, but that made it almost perfect so I did the same to the other corner to leave enough space for the charging port and switch. This foam is supposed to absorb shocks and protect the BMS.

I had more of this foam so to be better safe than sorry I slapped it to the back of the BMS as well. This way it also acts as a insulator for the charging port and switch!
From @bigben I got some sealing foam to make the board water resistant (or at least dust resistant). Here is a pick of it. You can also see why the extra wire on the bridge wiring comes in handy

From here on I forgot to take some pictures. But it is really straightforward, meaning the bridgewiring to the VESC. And connecting all the other parts. Just as the battery enclosure I put some rubber sealing on the VESC enclosure.

Then I soldered the VESC to the bridge wiring. Slapped some velcro tape to the back and mounted it on the board. And the same for the receiver and bluetooth module.

After this it was only a matter of connecting all the parts together. And measuring by eye what length the wires for the motor needed to be and hotglueing them to the VESC enclosure to seal it from dust or water.
AND THAT’S IT! (alright, not entirely. but just let me celebrate already!)

Charging both the remote and the board. Also; behold my beautiful temporary switch!
From here on I did some tweaks to the VESC. Unfortunately this is when I discovered that the bluetooth module doesn’t power on and I have no idea what the problem is. Maybe it’s faulty? I have set the VESC to PPM + UART (with baudrate 115200)


Thoughts on the flex
Alright, so as you probably have seen on this topic there are a few pictures of me standing on the board and showing of the flex. Standing in normal position and with my feet in the exact middle (and jumping) to show the flex. To make a long story short: after mounting the battery enclosure, the bridge wiring on top of the deck and the griptape probably also plays a role; the flex seems to have deminished. It is still there but somewhat less. The flex makes the board very smooth to ride. Living in Leiden, an old city with old rough roads where there is no bicycle lane, the flex really makes a difference. It absorbs a lot of the shocks! Till now I only scratched the battery enclosure because of me wanting to try out a very shallow pavement.
List of problems
So as of now I have 3 problems. They are:
- Bluetooth module not working, although controllmode is set to PPM + UART
- FIXED: No switch, but temporary battery connectors
- FIXED: Battery indicator not turning off, although backlight does (disconnected for now because of that)
Hope you guys can help me with this! Thanks!







