This summer I finished my second electric skateboard, and instead of using the usual Nunchuck remote I thought I would try to make my own. I am currently studying to become an electronics engineer, and recently bought a 3D-printer, so I thought it could be a fun summer project.
I have seen quite a lot of interesting remote builds on this forum, however many seems to me to be very complicated or an exaggeration with too many expensive components. I have always loved the simplicity of the Boosted Board remote, and therefor been trying to make something just like that - however powered by an Arduino.
The remote consists of quite a few components, including an Arduino Nano, a NRF24 transmitter and a 3,7V 400mAh LiPo battery etc. You can find a list of all the components I used here:
The 3D-model is done and the STL-files can be found on my Thingiverse page in a few days - I have to make sure everything is fitting nicely before you guys waste perfectly good plastic
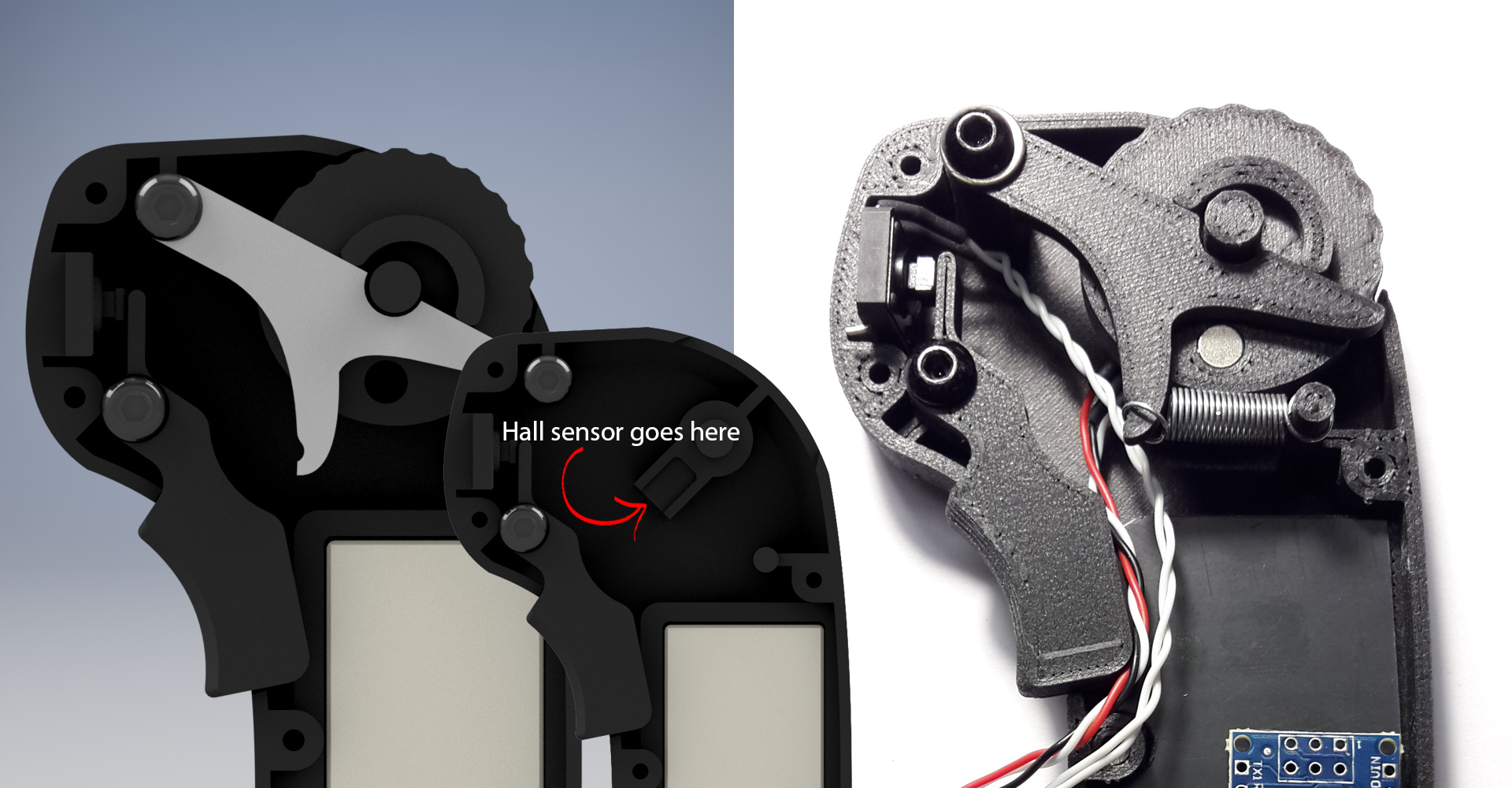
As you might see from the shopping list I use a linar Hall-effect sensor and two magnets to replace the more common potentiometer. The datasheet for SS495A says ”Ratiometric Linear sensors have a ratiometric output voltage, set by the supply voltage. It varies in proportion to the strength of the magnetic field”. By placing the sensor between two magnets (one north and one south) and moving the magnets over the sensor we get a nice throttle value.
I have been using my second prototype for more than 20km now and it feels very stable, however it has it flaws. I am therefore currently building a new prototype (the third). IMAGES !!
Nice there was a recent post asking about good remotes posted my own similar incarnation there, should add yours to the list there for potential options (mine is still alpha quality at best, but been using it for over a year)
Same here, it’s about time we saw a remote design that can use both trigger and thumb configurations!
Would you consider doing a gt2b mod version of this?
First of all thanks for all the nice comments, I am very glad you like my work ! I am currently working on some schematics and finishing up the third prototype.
@GrecoMan I will make a guide for you guys as soon as I get to finish the newest version - final parts are 3D-printing at the moment !
@wafflejock Yeah I have just checked out your design! I like the simplicity of your remote, I could fit a whole lot of electronics in that beast! My design is much more compact, with no or little room for extra electronics
@Cobber@High-roller Glad you like! I will be posting a video of the trigger and throttle mechanism in the bottom of this post! I am afraid I don’t own a gt2b remote, and I am not sure if the electronics will fit - so probably not! And doesn’t there already exist a ton of great enclosures for gt2b remotes?
@DevoCut Thanks! I am using the european version of the CR-10 called Afinibot A31. It’s basicly the same printer, however with a few improvements.
@baxter Thanks! I will keep you updated on the progress
Thanks Would be awesome to see it being made and used by you guys! It is a itzy bitzy OLED LCD (128x32px) to show battery level, signal strenght etc. Could be programmed to show basicly everything - even VESC data by using the UART library made by RollingGecko (https://github.com/RollingGecko/VescUartControl).
Yeah beautifully done on your design and thread here definitely inspiring me to want to redo mine but need to put it on the backlog pile of things to do for now, maybe I’ll get around to it in a few weeks. I considered doing the linear hall sensor idea too so cool to see someone who actually implemented it. I went with the potentiometer and trigger route because it’s basically what I had previously and just took the same concept for my own controller.
Definitely big but I was putting a mess of wires and big boost converter and nonsense in there but have since figured out how to get it down to a small stack of PCBs, those NRF modules you’re using are super compact though that’s awesome. I’m pretty sure you don’t need the boost circuit if you get the 8MHz pro mini boards they run on 3.3V so they’re pretty much good using the LiPo power directly into the RAW pin and getting regulated down to 3.3V for most of the life of the LiPo (speed grades section in the ATMEGA328P shows it at 10MHz with less voltage so should be good) in my own testing has been pretty stable without the boost. Only issue I have is when the battery is really low in the remote it doesn’t read the top end in the ADC as high as it should so the throttle signal is sending lower/sluggish speed but kind of good because lets me know I need to juice up the remote. Awesome thing is all these parts use almost no power either way so the battery lasts forever.
Thanks I really appreciate your kind words ! The potentiometer is a great solution, however I couldn’t find a way to make it small enough to fit in my remote. Also the Hall sensor setup is quite solid, because there are no mechanical wear on the throttle. I have been thinking of using the 3.3V Arduino, however the Hall Sensor makes this impossible as it requires at least 4,5V to operate optimal.
There are probably some Hall Sensors of the same type that works at 3.3V however I had already ordered mine And as you mention yourself, when the battery voltage drops below 3.3V the reference voltage will drop, so will need some kind of undervoltage circuit that prevents that - the easy solution a Boost converter ! They come in very small sizes and cost no more than 5$.
Gotcha yeah had the afterthought that some of the other components here might need higher voltage. Regarding the cut off think it can probably be done with a zener diode too but I’m not entirely sure so far I haven’t really had a problem since most of the time the voltage level is far above what’s needed anyhow (4.2V-3.6V is where it’s at a majority of the charge). Yeah the boost converter I had was variable and big will have to check out the ones you used here too looks super compact, I don’t think I need it but good to be aware of what’s out there for future stuff anyhow.
I’m flying racing drones, and have recently upgraded my gimballs in my remote to hall sensors. It feels so much better and so much more precise now. So seeing your project makes me wanna start my 3d printer now
How much do it cost in parts to build this nice remote, with LCD ?
@Silverline Thanks! Yeah Hall Sensors are great :P! I have made a “shopping list” with the prices in Google Sheets, and the price for the remote is roughly 34$ (not including 3D-printed parts).



 !!
!!






 ! They come in very small sizes and cost no more than 5$.
! They come in very small sizes and cost no more than 5$.
 How much do it cost in parts to build this nice remote, with LCD ?
How much do it cost in parts to build this nice remote, with LCD ? I like better the one from Sparkfun
I like better the one from Sparkfun