The reason for the name and what got me into e-sk8 is a funny story. I had a regular trick skateboard with big wheels and risers that I used to commute on so I didn’t have to walk between public transport. At the end of a work party that was on a boat we where walking back down the pier and one of my co workers wanted to try my skateboard. I said sure, just don’t launch it of the side of the pier. 5 seconds after I gave him the board it shot of the side and KA-PLONK. Hence the name Under The Sea. He was kind enough to offer to replace it, he gave me $200 which I used towards building an e-sk8. I don’t think I would have got into it at the time as I didn’t have the budget for one, but I had been thinking about building one for a while.
I have been riding it now for about 6 months and now it’s time for some upgrades, hence the V2 build log. I have been ridding this around 15km 2-3 days a week as part of my commute. It replaces my need for bus or taxi’s.
It was a tight budget build with total spend around $700 usd. Mostly chinese parts, one to keep a low budget and secondly being in Hong Kong shipping is much faster than from the US or Europe. I got the trucks, motors, mounts, belts, pulley, wheels and bearings as a kit of ebay $220. Questionable quality but all that stuff is still working. I have replaced the belts pulleys and bearings though.
Now to the upgrades. I want better reliability as I was constantly shredding belts and wearing out motor pulleys. Running 12s with 270kv motors meant I had to use 4:1 (12-48) gear ratio that led to many downsides. The 12 tooth motor pulleys wear out really fast, once worn they slip under heavy breaking and shred belts. The 48 tooth wheel pulley is pretty close to ground so gets some rock damage over time. Luckily I designed and printed the wheel pulley myself so its an easy item for me to maintain. Also the power delivery was brutal and was difficult to tune out with the vesc settings. I eventually changed to 15-48 gearing and the 15 tooth pulleys are much more reliable and the smaller ratio has really smoothed out the power delivery.
So I wanted to change the motors to a lower KV so that I could have a better drive ratio. Which would lead to better reliability. I found these 5065 140kv motors that would allow me to run a 2:1 (20-40) ratio. After receiving them I was bummed out to realize they where 70mm long and didnt fit my trucks. I needed longer trucks but didnt find any until torque boards made the extra wide caliber II style trucks. Which are on the way and should have on hand in a week or so.
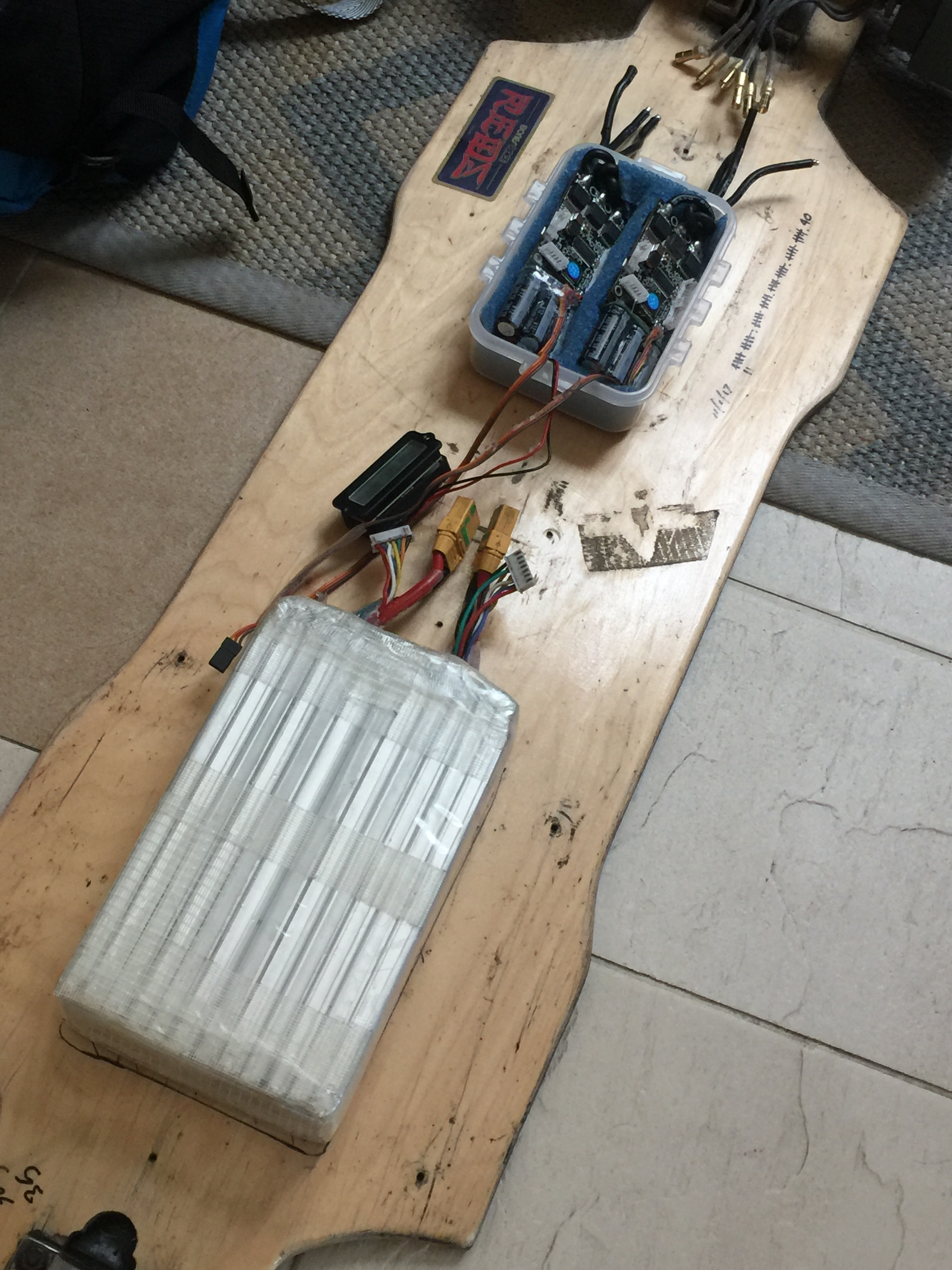
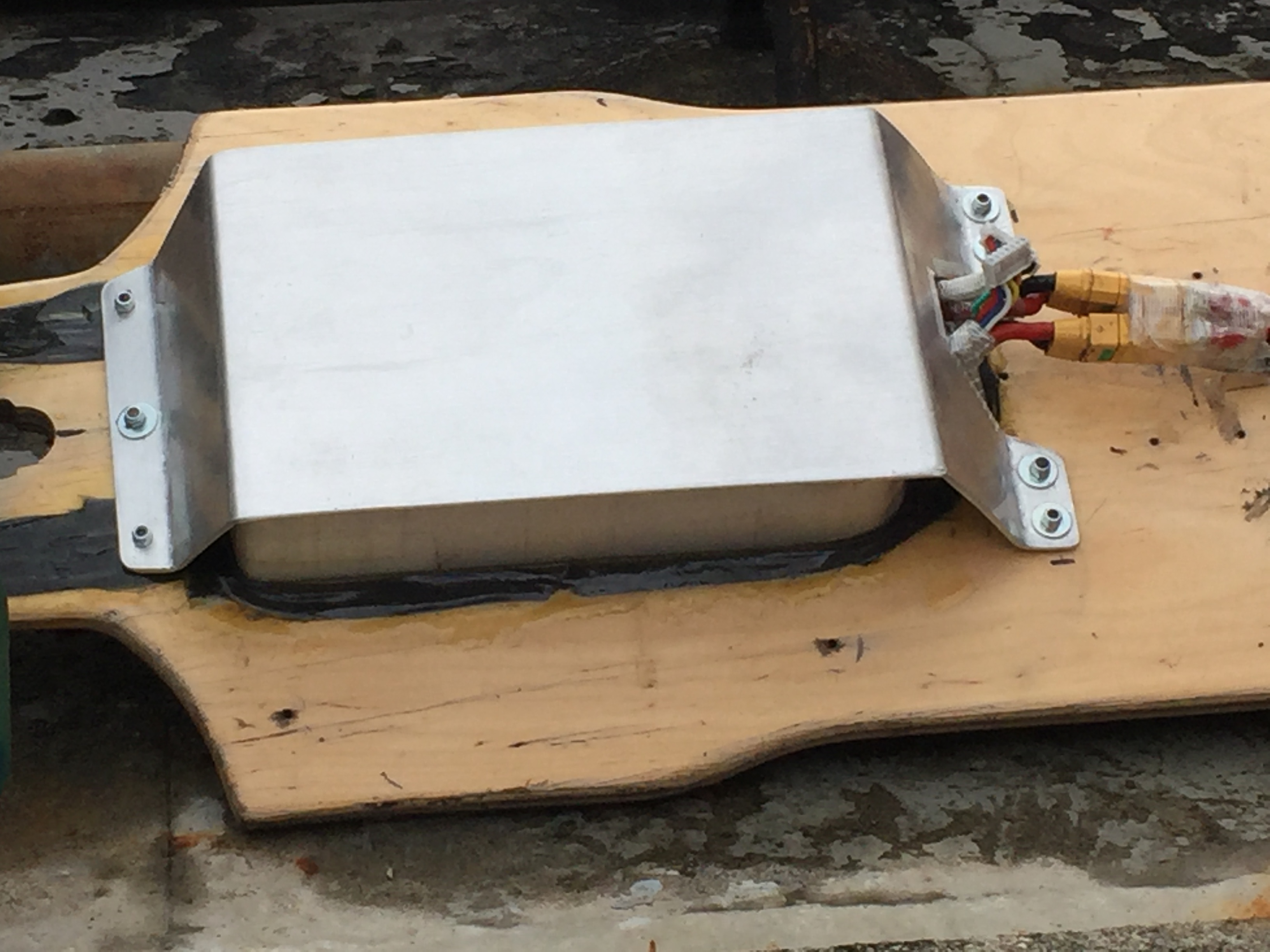
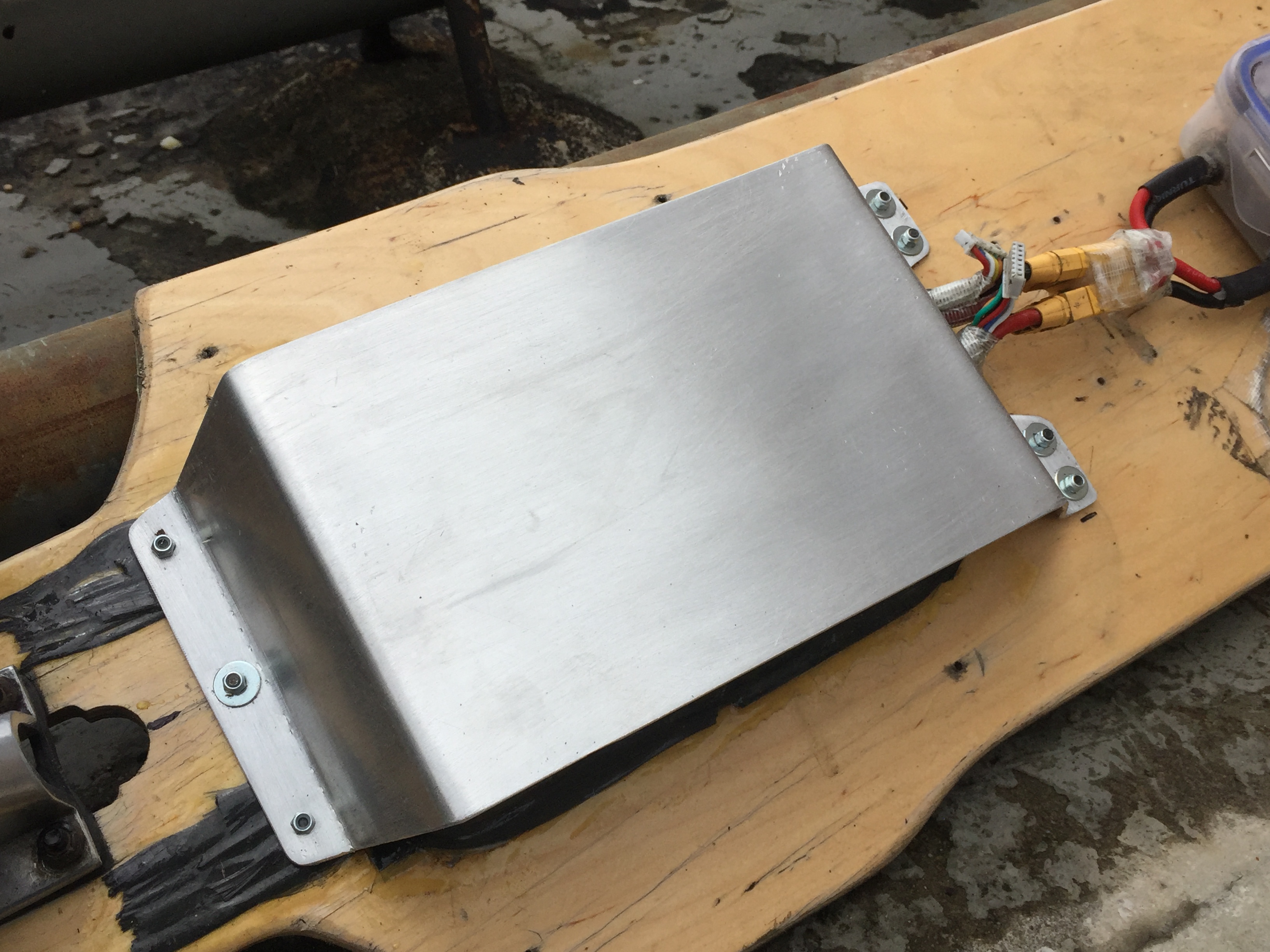
I will be making the motor mounts once they arrive, I will also be upgrading my battery mount design and esc lunchbox so its more water proof. Pics below of the current build state.
Yes, they have been perfectly reliable. I have not tried FOC though, they advised not to. Kept my battery wires as short as possible and being 12s the amp draw is lower so they don’t get hot. I wish they had a bootloader though.
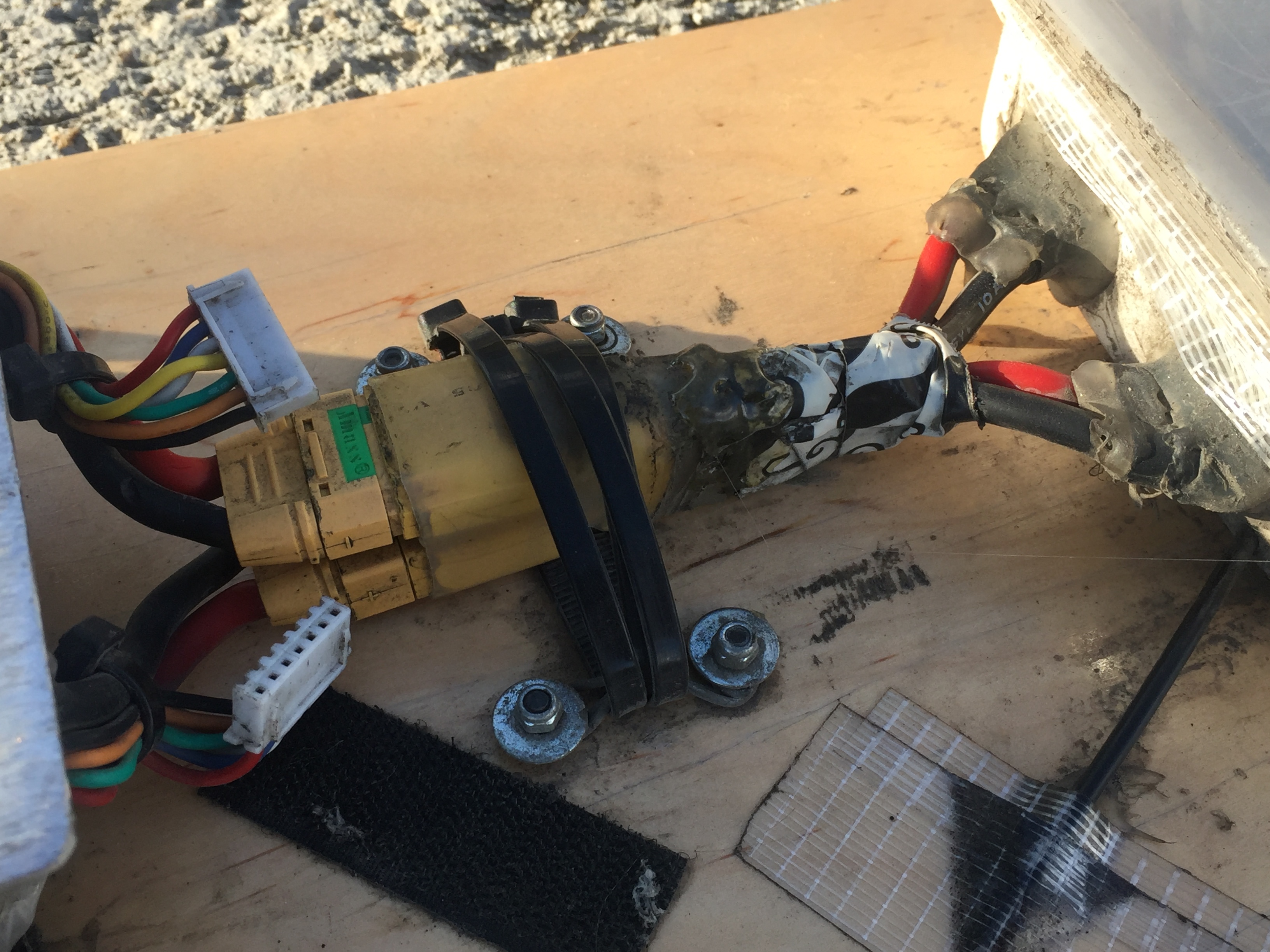
She’s not pretty but she’s fast, 43kph which is too fast for a skateboard and always scaring me. I hope to clean it up a bit as I upgrade. Notice how the battery is taped on but the tape is bolted down, I think that’s funny. There is Velcro too under the aluminum plate. The tape wears out though and I have to re-strap it every week or two so this is one part I want to fix.
Update: Working on my motor mount design. I want to start cutting metal but I don’t know the exact profile of the clamp area on the torque 218 trucks. I think I gotta wait till I have them in hand.
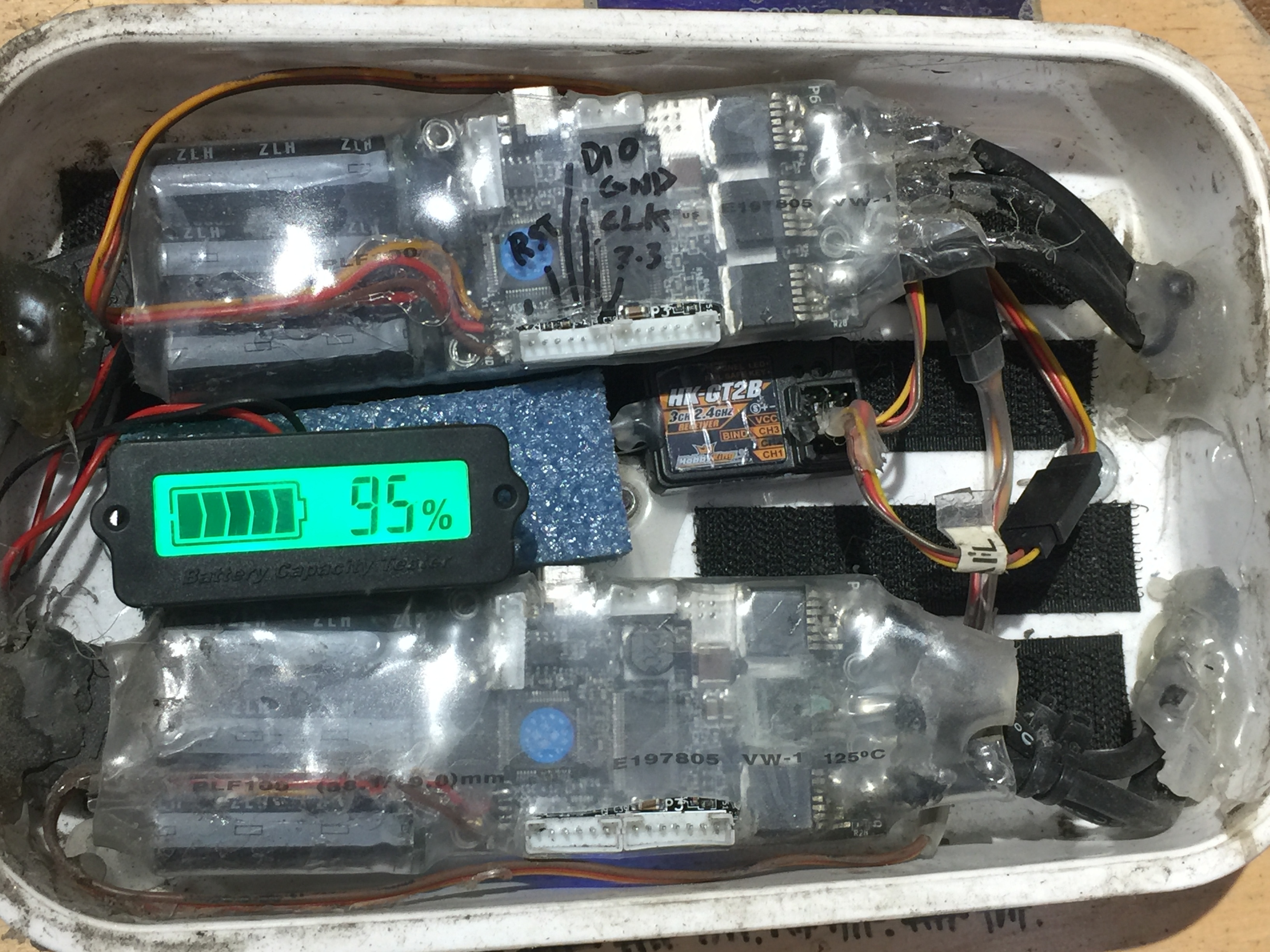
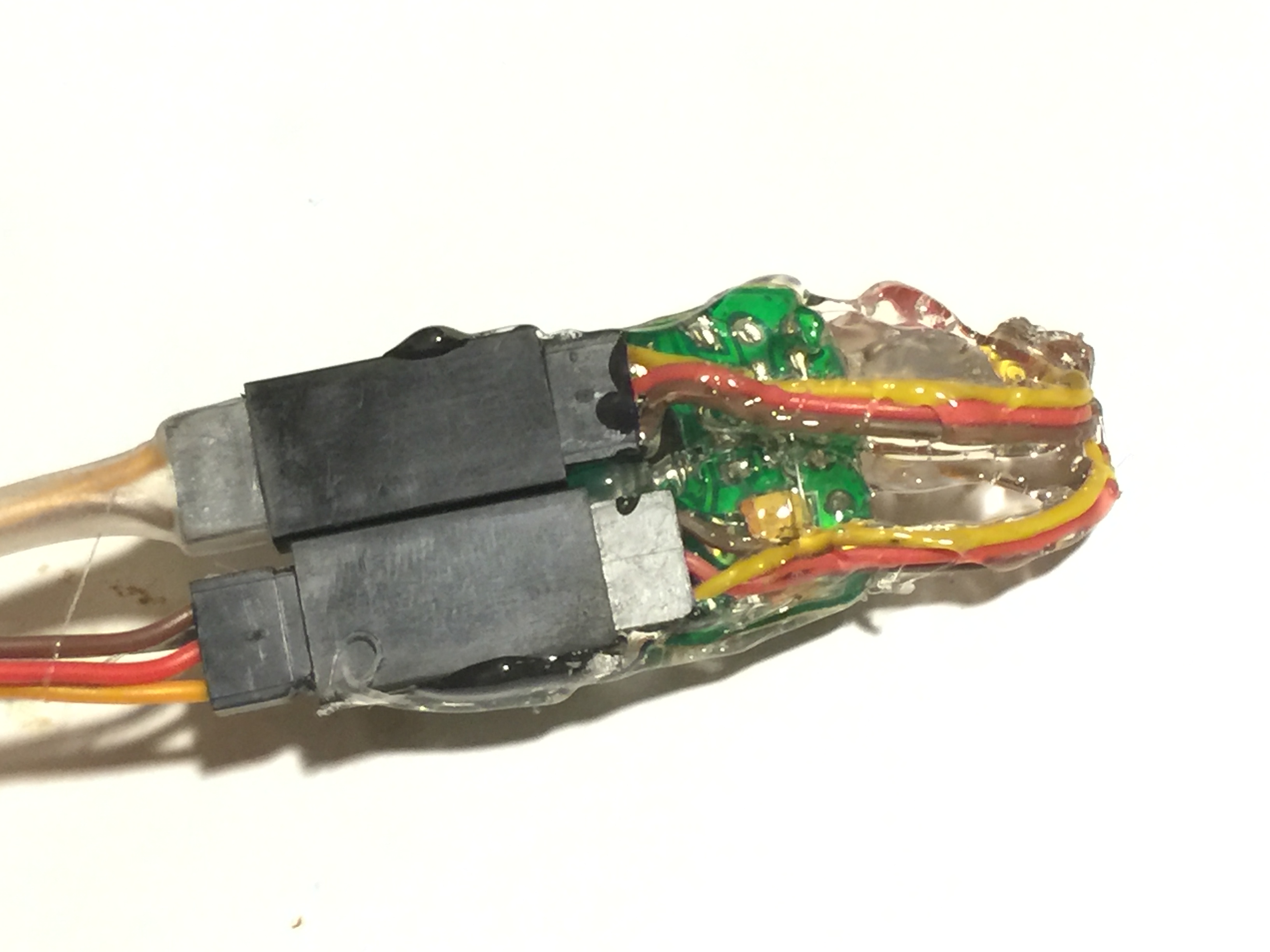
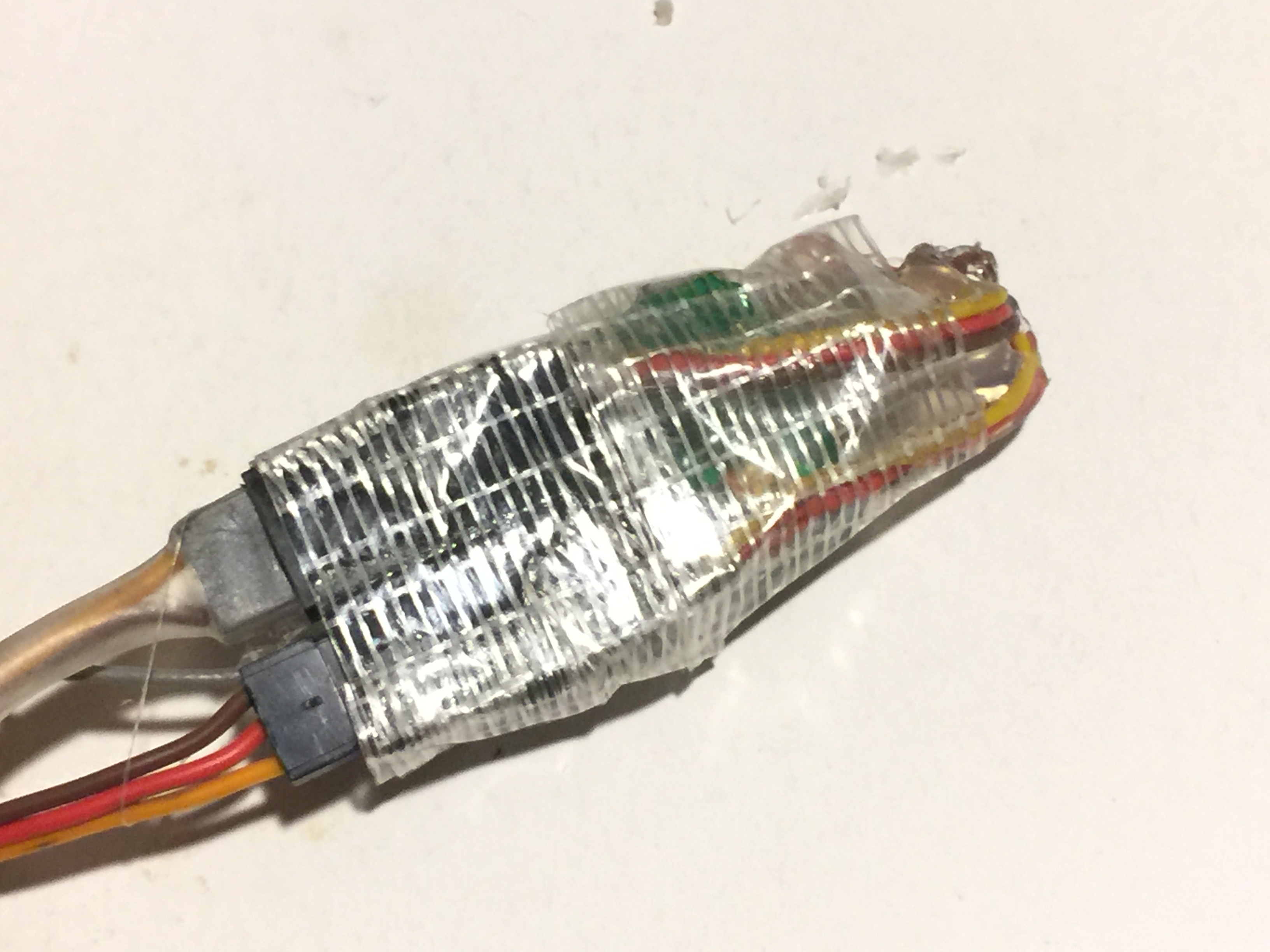
Updates: I water proofed the battery, sunk it down into the deck and got rid of the tape hold down straps. Replaced the lunch box for a smaller one that I hoped would be water tight. De-cased the GT2B receiver as space was limited.
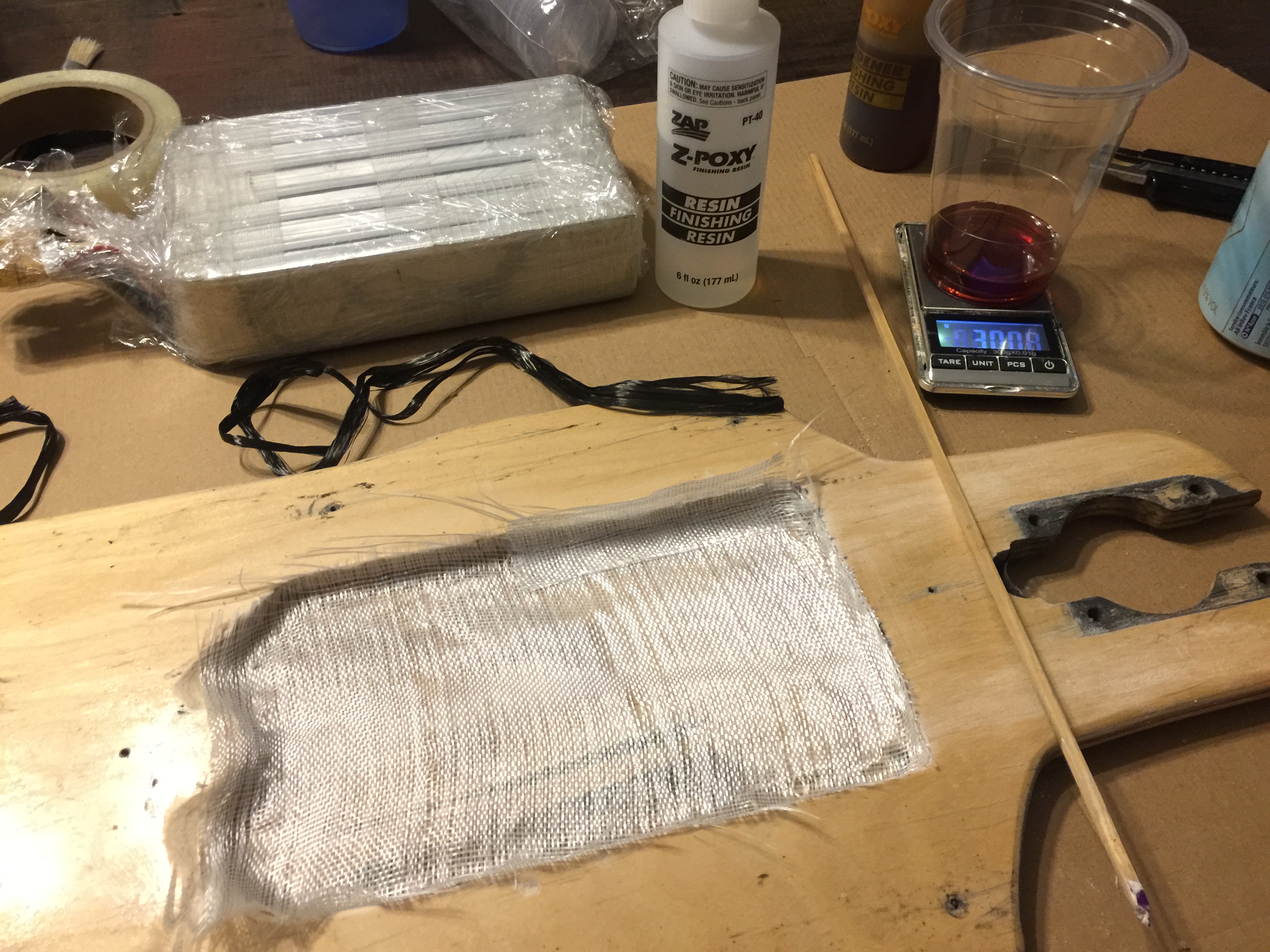
Two batteries become one. They are double taped together in the middle, then glass fiber tape, then hot glue around the ends, then one layer of shrink wrap, some more hot glue, another layer of shrink wrap and some more hot glue. Finally some shaping with hot air gun on the ends and some more glass fiber tape. No water be getting inside.
I do not recommend using a dremill for this. This sucked, it took for ever and if you push too hard the router bit vibrated from flexing. At the end my dremill died, I think the brushes are toast.
Putting the two vesc’s receiver and battery meter in this small lunchbox was much more challenging than I was expecting. I have the vesc’s set at angle so that its easy to get to the USB plug for quick tuning changes. I had to decase the receiver and my first setup didn’t work properly as it would cut out going up hills at full throttle. At first I thought it might be my BLDC settings but after I thought about it I came to the conclusion that the receiver was too close to the motor wires. In fact one of the PPM wires wrapped over a motor wire.
So I moved the receiver and its PPM wires away from the motor wires. Also I covered it in hot glue then glass tape then aluminum tape to hopefully block some RF noise and make it water proof.
Some updates: The bolt holes one the deck where starting to crack apart due to the all the rain ridding and being a drop through. So I decided to fill the hole with a 3D printed part and some fiberglass and a little carbon toe I had on hand from building model planes. I think its about time I buy a new deck but I hope this can last a few more months. New grip tape is on the way and I might paint it black to hide the sins.
I tried to improve the water proofing with a RTV gasket. Which didn’t really perform better than the old gasket. I think ridding through puddles at high speed is not that easy to seal against so Im looking into better sealing enclosures. The water killed one of my vesc’s so now I’m ridding a single motor for a week or so. Its slooow.
The torque 218s arrived. The long axels mean you can run wider than 218mm, there is enough length for two spacers! I got it mocked up with 3D printed clamp and motor mounts.




















 .
.


 .
Sorry, I like the build! Please post how the new Caliber Trucks work out for you.
.
Sorry, I like the build! Please post how the new Caliber Trucks work out for you.































 so now I’m ridding a single motor for a week or so. Its slooow.
so now I’m ridding a single motor for a week or so. Its slooow. 















