You must connect two wires between the VESC’s, Run the two wires connecting the two middle pins of the four pin connector. You may buy this connector and just use the two middle pins, its called a “JST-PH 2MM” connector.
Hey I was just thinking of this…
if you are connecting 2 VESC’s together a lot of the electronics is probably wasted on the 2nd VESC. wouldn’t it be possible to have a VESC daughter board made with basicly just the FETS and related electronics. so all the signaling is done on the main VESC and then the 2nd motor is run by a daughter board signaled from the first VESC.
Hey if i connect my remote receiver directly to one of the VESC and then link the two as shown in this post will everything work fine, after programming it correctly of course?
I had this setup running really nicely until yesterday. I have the same settings as shown in the above examples. Yesterday I was riding allot and a few times the slave motor wouldn’t spin on startup, I restarted the board and things worked fine, then nothing at all. I’ve been troubleshooting all night and got the motor going a few times then it would stop responding and now I cant get anything from it.
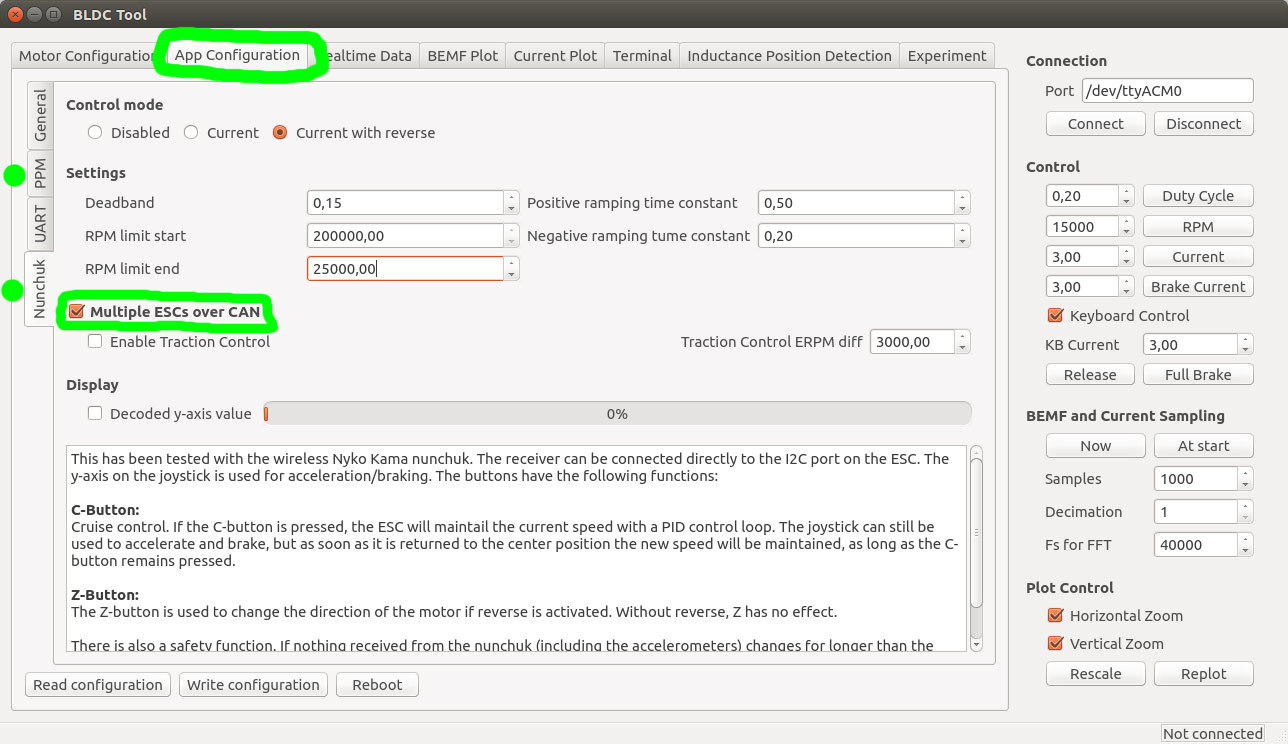
I’ve checked and re-soldered the CANBUS connection, the VESC is on with blue lights (good) and the motor spins on the detection test in BLDC but I can’t control the second motor using my GT2B which is connected to the master VESC, Im not getting any pulse width readings in the PPM app, however I do if I am connected to the master VESC.
I’d love to hear any suggestions so I can get this thing back up and running for the weekend, single drive sucks after you’ve experienced the wonders of dual rear
While I think it is great that we can use this capability I think splitting the servo signal is still the most robust option. I recently configured two vesc as a master/slave and encountered the same issues.
I wonder if it works more smoothly using the nunchuk instead of PPM?
Hi, what does splitting the servo mean ? Do you mean have the wireless receiver input to both of the vescs in parallel as opposed to having them connected via CANBUS ? Does that work ?
Yes, you split the signal. You have to drop the positive on one so you will only pull power off of one VESC to power the receiver. I think this will disable any traction control though.
I see. What is traction control ? I’ll be building mine soon so I want to know what I should do. The issue with CANBUS is that it stops working some time ??
ah I see. I’ll probably try to use CANBUS then and I’ll switch if I encounter any issues.
Also the issue you describe is independent of the receiver itself? I will be using the Nyko Kama.
Also just as a general question, if splitting the signals, the current into each VESC connector would be cut in half right? Does the VESC still work fine in that case?